- 엔코더
- 기술
엔코더 기술
자기 기술
자기 엔코더는 홀 (Hall) 효과 센서를 사용하여 회전 동작을 감지합니다. 센서는 축에 부착된 영구 자석의 방향을 감지합니다. 그런 다음 마이크로프로세서가 센서 시그널로 부터 축의 회전 각도를 계산합니다. 단순한 기계적 원리로 인해 자기 엔코더는 광학 엔코더보다 더 작고 훨씬 견고합니다.
또한 성능 측정 측면에서도 차세대 자기 기반 엔코더는 광학 엔코더를 따라 잡을 수 있습니다. 강력한 마이크로프로세서, 최적화된 시그널 처리 소프트웨어 및 구현된 온도 보상으로 측정 정밀도가 0.1도 이상으로 향상되었습니다. 열 조건으로 인한 편차는 최소로 감소됩니다. 또한, 엔코더의 반응시간이 이전에 700에서 1,400 마이크로세컨드 사이였는데 거의 0 마이크로세컨드에 가까운 수준으로 감소하여 광학 엔코더의 반응 동작을 제공합니다.
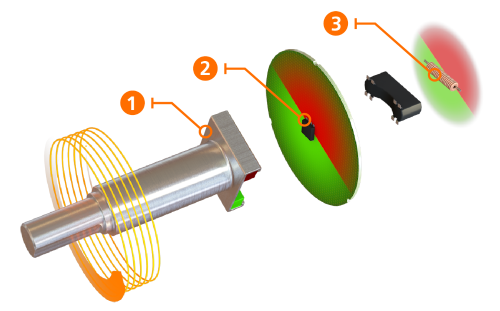
값이 손실되지 않음: Wiegand 효과
자기 엔코더는 0도와 360도 사이의 각도에서 회전을 감지하지만 홀-효과 센서는 외부 전원공급장치가 없으면 전체 회전 수를 감지할 수 없습니다. 이것은 Wiegand 효과를 기반으로 하고 회전 카운터 회로에 짧고 강력한 전압 펄스를 공급하는 내장된 에너지 픽업 시스템으로 해결됩니다. 즉, 엔코더가 외부 전원공급장치 없이도 저속 회전을 신뢰성있게 감지하고 저장할 수 있음을 의미합니다. 그러므로 예를 들어 리프팅 메커니즘의 압력 손실 등으로 인한 기계 작동시간을 벗어난 축 회전으로 인해 잘못된 위치 할당이 배제됩니다.
광학 기술
투과형 센서는 코팅된 유리판에 에칭된 슬롯을 통해 빛을 방출합니다. 빔이 파괴될 때 펄스가 생성됩니다.
- 광학 엔코더는 매우 정밀합니다.
- 광학 엔코더는 다수의 개별 구성요소로 구성된 매우 복잡한 디바이스입니다.
- 코팅된 유리 디스크의 생산은 어렵고 비용이 많이 듭니다. 자기 기술을 사용하는 엔코더와 비교할 때 충격과 진동에 노출되면 쉽게 파손됩니다.
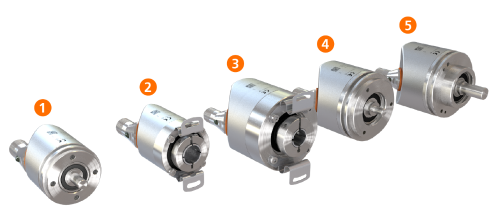
플랜지 및 축 타입 한 눈에 보기
- 6 mm 축을 가진 싱크로 플랜지 RB / RMB 타입
- 중공축을 가진 직접 플랜지 RA / RMA 타입
- 중공축을 가진 직접 플랜지 RO / RMO 타입
- 6 mm 솔리드 축을 가진 싱크로 플랜지 RU / RMU 타입
- 클램프 플랜지 및 10 mm 솔리드 축 RV / RMV 타입
축 디자인
솔리드 축
솔리드 축 엔코더는 커플링을 사용하여 직경이 동일하거나 비슷한 회전 기계 축에 부착됩니다. 이 커플링은 두 축 사이의 기계적 오프셋을 보정하여 조기 마모를 방지합니다. 따라서 이러한 조합은 일반적인 충격이나 진동이 발생하는 어플리케이션에 적합합니다.
중공 축
중공 축 엔코더는 회전축에 직접 장착됩니다. 축 커플링이 필요하지 않으므로 조립이 용이합니다. 대신 고정자 커플링이라고 하는 유연한 장착 플랜지를 사용하므로 약간의 설치 오정렬 현상이 보완됩니다. 중공 축이 한쪽으로 열려 있는 엔코더에는 마운팅 구멍이 없습니다.
축 지름 및 구성 크기
들어오는 축을 정확하게 제자리에 고정되도록 하려면 정확한 축 직경 사용이 중요합니다.
솔리드 축의 일반적인 직경은 6 mm, 8 mm 및 10 mm입니다.
한쪽 끝이 열려있는 중공 축의 일반적인 직경은 6 mm에서 15 mm 사이입니다. 직경 유연성을 높이기 위하여 6 mm에서 14 mm의 어댑터 슬리브가 중공 축에 삽입됩니다.
엔코더의 외부지름은 일반적으로 엔코더 크기로 표현됩니다. ifm 엔코더는 36 mm 에서 58 mm 크기로 제공됩니다.