- 엔코더
- 어플리케이션
어플리케이션 사례
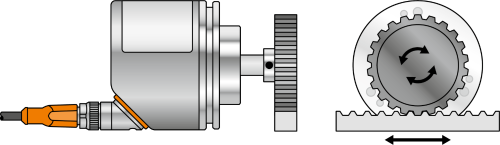
회전, 높이 및 선형 이동
사례: 톱니모양 휠의 앱솔루트 멀티턴 엔코더를 사용하여 리프트의 높이를 결정합니다.
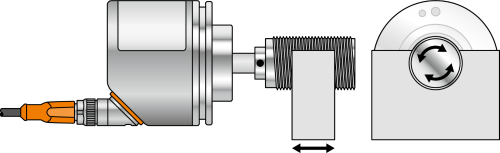
회전 및 거리 이동
사례: 앱솔루트 멀티턴 엔코더를 사용한 정확한 포지셔닝을 위한 스핀들 조정
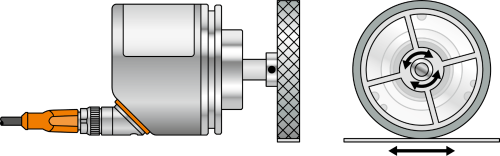
회전 및 선형 이동
사례: 측정 휠 의 인크리멘탈 엔코더를 사용한 선형 측정
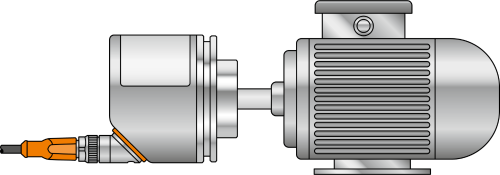
속도 결정을 위한 회전 움직임
사례: 인크리멘탈 엔코더를 사용한 모터의 회전 속도 감지
위치 확인을 위한 회전 움직임
사례: 앱솔루트 싱글턴 엔코더를 사용하여 다양한 생산 단계를 위한 로터리 인덱싱 테이블 포지셔닝
각도 결정을 위한 회전 움직임
사례: 앱솔루트 싱글턴 엔코더를 사용한 AGV 작동을 위한 스티어링 각도 감지
지게차와 AGV에 사용합니다
컴팩트한 IO-Link 멀티턴 엔코더는 AGV 및 지게차에 특히 적합합니다. 작은 36 mm 직경의 하우징으로 설치공간을 절약할 수 있습니다. AL1xx 타입 IO-Link 마스터 및 표준 M12 케이블을 사용하여 모든 일반적인 컨트롤러에 연결할 수 있습니다. 그러므로 조립되어야 하는 고가의 필드버스 케이블이 더 이상 필요하지 않습니다.
포크 너비 조정
지게차의 포크 너비는 기어 휠 및 랙을 사용하여 조정됩니다. 기어 휠 에 장착된 앱솔루트 엔코더는 정확한 포크 너비를 결정하고 컨트롤러에 보고합니다.
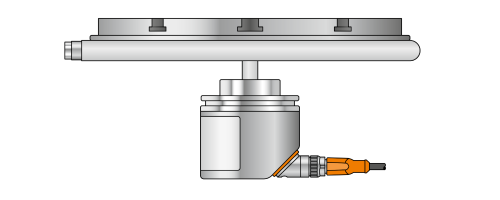
포크 높이
포크 높이를 정확하게 결정하기 위해 앱솔루트 엔코더는 케이블 로프 풀리의 회전을 감지하고, 이 정보를 디스플레이 장치 및 컨트롤러로 전송합니다.
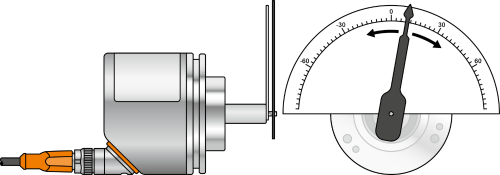
드라이브 휠 및 스티어링
스티어링 시스템에는 2개의 엔코더가 설치됩니다: 하나는 휠의 스티어링 각도를 정확하게 결정하고 다른 하나는 드라이브 모터의 축에 위치하여 두가지 프로세스 값을 제공합니다: 최소 -1의 회전 속도와 정확한 휠 위치
다른 기계
펀칭 기계의 시트 절단
무한한 금속판이 기계를 통과하며 정의된 길이로 펀칭됩니다. 포토 센서는 시트의 전면 가장자리를 살펴보고 스위칭 시그널을 사용하여 측정 휠의 엔코더를 제로로 세팅하여 카운팅 프로세스를 시작합니다. ifm 엔코더의 이 직접 리셋 입력은 PLC와 관련이 없음을 의미합니다. 빠른 프로세스도 시간 지연 및 이에 따른 기계적 변위가 효과적으로 방지됩니다. 길이 측정 외에도 IO-Link 엔코더는 벨트 속도를 두 번째 측정 값으로 출력합니다.
팬 모니터링
팬 축에 설치된 엔코더는 속도만 모니터링할 수 있습니다. 또한 작동시간을 기록하여 유지보수 주기를 최적화하는 데 도움이 됩니다.
열 성형 포장기계
컨베이어 벨트는 공급된 필름과 동시에 작동되어야 합니다. 측정 휠에 장착된 엔코더는 속도를 정확하게 모니터링하고 가장 작은 편차도 컨트롤러에 보고합니다.
롤러 컨베이어
긴 컨베이어 라인은 개별적으로 분리된 드라이브 세그먼트로 구성됩니다. 걸림이나 충돌을 방지하기 위해 드라이브 축에 엔코더를 설치하여 모든 드라이브 속도가 동일한 상태로 실행되도록 합니다.
오버헤드 컨베이어
도축장에서는 고리에 걸린 사체의 반이 오버헤드 컨베이어에서 저장 벨트로 원활하게 옮겨집니다. 원활한 운송을 위하여 두 시스템은 절대적으로 동기화되어 작동해야 합니다. 두 시스템의 엔코더는 시스템의 완벽한 동기화를 모니터링합니다. V4A 하우징과 보호등급 IP 68/69K로 엔코더는 도축장에서 흔히 볼 수 있는 극한의 세척과정에도 내구성이 있습니다.