- 3D形状認識
- O3Rロボティクスプラットフォーム
O3Rプラットフォーム検知
プラットフォーム検知一覧
O3Rプラットフォーム検知は、一般消費者向けのサイズとコスト感でありながら、産業用製品の長期的稼働と堅牢性をそなえた、マルチセンサおよびカメラゲートウェイです。最高6台のカメラヘッドをFPDリンク経由で中央処理装置に接続でき、レーダやライダなどの追加のセンサをGigabit Ethernetインターフェース経由で接続できます。取付け位置と配置の柔軟性により、幅広くさまざまなエリアをスキャンでき、セーフティスキャナの視野より上にある、移動経路に突出する障害物との衝突を回避することもできます。
強力な中央エッジ演算ユニットは、お客様独自のアルゴリズムを実行したり、衝突防止やパレット検出などのすぐに使用できる機能を使用したりするために、十分なスペースを提供します。
トピック
自動車産業での最高レベルのオートメーション
自律走行車(AV)産業は、自動運転レベル5を目指しています。これは運転者の介入が不要な完全運転自動化で、一般消費者がAVを購入できるようになります。
- レベル5を達成するには、車両が環境をよりうまく認識できるようになる認知スタックが必須であることをメーカーは認識しています。
- 車両周囲の認知のためのマルチモーダルアプローチ
- 各モダリティは別のモダリティの「弱点」を克服するように設計されており、クラス最高の環境認識向けの堅牢なプラットフォームを形成しています。
移動ロボットの課題
移動ロボットの自律走行は新しいものではありません。(1950年代に初めて導入)
- AV産業とは異なり、移動ロボット導入の障害はコスト面です。
- 移動ロボットの導入にはユーザ側の多大な投資が必要で、高いROIを達成するまでに時間がかかります。
- メーカーは、BoMコストを削減するためにハードウェアの選択では安全性を重視し、その他を妥協せざるを得ません。
- そのため、ロボットの全体的な柔軟性が制限され、機能が削減されます。
妥協しなくてもよいとしたらどうでしょうか。
AVの「前例」にならう
AV業界の、自動運転レベル5を達成するためのアプローチは間違っていません。より的確に環境を認識することにより、AVの柔軟性と全体的運用が向上します。移動ロボット産業にも同じ機能が存在すれば良いのです。
これを実現するためには、センサの同期や融合など、マルチモーダル、マルチカメラアプリケーションの課題を軽減する必要があります。プラットフォーム検知のトータルコストを削減する唯一の方法は、マルチモーダルシステムの設計と統合を簡素化することです。
O3Rプラットフォーム検知は、このタスクを実現するために設計されました。
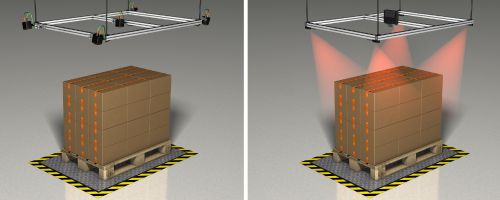
O3Rプラットフォームは、AGVなどの自律走行ロボットの画像およびセンサ情報を集中化し、同期処理するための包括的ソリューションです。統合の簡素化と、カメラとセンサの信頼性の高い相互作用により、衝突防止、ナビゲーション、位置決めなどの重要な機能の高い精度を実現できます。さらに、静止物体の分析と寸法測定を実装し、複数のカメラによってより効果的に処理されます。たとえば、パレット、木材、パッケージやスーツケースの測定などがあります。
自社開発のイメージャ付きカメラヘッド

ifmはプラットフォームソリューションに適した高性能なカメラヘッドを提供します。pmdtechnologies ag社製の最新のタイムオブフライト技術を備えた2D/3Dカメラの視野角度は、60°または105°から選択できます。ifmグループである同社は、オートメーションに適したビジョン製品向けに、それぞれの要件に合わせてあらゆるセンサを開発しています。2D/3Dカメラは変調された赤外線により、外乱光の強い環境でも最大レベルの信頼性で物体を検出します。
パワフルでオープン:センサ処理の中央装置

システムの中心はビデオプロセッサ(VPU)というパワフルな演算装置です。Yocto LinuxおよびNVIDIA Jetson TX2に基づき、ROSやDockerなどのオープンな開発環境をサポートします。最高6台のカメラヘッドを演算装置に接続できます。ドアやパーティションウォールなどのガラス表面を検出するための超音波センサなどの追加センサは、Gigabit Ethernetインターフェース経由で接続できます。このようにして、AGVが安全な自律走行に必要とするすべての「感覚」が中央ポイントで利用できるようになります。
O3Rソフトウェアアーキテクチャは、豊富なソフトウェアツールの選択肢と多数のインターフェースのサポートにより、事前開発とシリーズ開発の両方を容易にします。Dockerアーキテクチャを使用することにより、Python、ROS、CUDA、C ++などのオープン開発環境をサポートします。
| Linuxはロボティックスで最もよく使用されているOSです。補助デバイスも同じ言語を使用する必要があります。 | |
| コンテナにより、開発者はプログラミング言語と環境を非常に柔軟に使用できます。使い慣れたソフトウェア環境を使用することで、開発時間が短縮できます。 | |
 |
ROSは開発に使用される一般的なミドルウェアです。ROS2は開発からデプロイへの移行を可能にします。 |
| CUDAやJetpackなどの強力なツールは、NVIDIAベースのVPUに完全にデプロイできます。 |