- Pengenalan objek 3D
- Platform Robotika O3R
Platform Persepsi O3R
Sekilas tentang platform persepsi
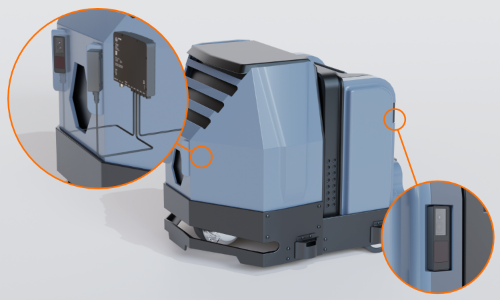
Platform persepsi O3R adalah gateway multi sensor dan kamera dalam ukuran dan struktur biaya produk konsumen dengan ketersediaan jangka panjang dan ketahanan produk industri. Hingga enam kepala kamera dapat dihubungkan ke unit pemrosesan sentral melalui FPD link dan sensor tambahan seperti radar atau lidar dapat dihubungkan melalui interface Gigabit Ethernet. Berkat posisi dan pengaturan pemasangan yang fleksibel, berbagai area yang berbeda dapat dipindai dan, misalnya, benturan dengan rintangan yang menjorok di jalur pergerakan di atas bidang pandang pemindai pengaman dapat dicegah.
Unit komputasi edge sentral yang andal menawarkan cukup ruang untuk menjalankan algoritma Anda sendiri atau menggunakan fungsi yang sudah jadi, seperti pencegah benturan atau pendeteksian palet.
Topik
Tingkat otomatisasi tertinggi dalam industri otomotif
Industri Kendaraan Otonom (AV) sedang dalam upaya mengejar otonomi Level 5, otomatisasi penuh tanpa memerlukan interaksi sama sekali dari pengemudi, dan memungkinkan konsumen umum untuk membeli kendaraan otonom.
- Produsen mengakui Level 5 hanya bisa dicapai dengan struktur data persepsi yang memungkinkan kendaraan lebih memahami lingkungannya.
- Pendekatan multi-modal untuk persepsi di sekitar kendaraan.
- Setiap modalitas dirancang untuk mengatasi "kelemahan" pada modalitas yang lain dengan membuat platform yang tangguh untuk kesadaran lingkungan yang terbaik di kelasnya.
Tantangan dalam robotika bergerak
Otonomi bukanlah hal baru dalam hal Robotika Bergerak (pertama kali diperkenalkan pada tahun 1950-an).
- Tidak seperti industri kendaraan otonom, poin biaya adalah penghalang untuk adopsi robot bergerak.
- Titik masuk untuk robot bergerak memerlukan investasi yang besar dari pengguna, dengan meningkatkan waktu untuk mencapai ROI yang kuat.
- Produsen terpaksa berkompromi pada pemilihan hardware, terutama berfokus pada keselamatan, untuk mengurangi biaya BoM.
- Pada akhirnya, hal ini membatasi fleksibilitas robot secara keseluruhan, dan pada gilirannya, mengurangi kemampuannya.
Bagaimana jika Anda tidak perlu berkompromi?
Meniru apa yang telah dilakukan dalam industri kendaraan otonom
Industri kendaraan otonom tidak salah dalam pendekatan mereka untuk mencapai Otonomi Level 5.Kesadaran lingkungan yang lebih baik mengarah ke fleksibilitas yang lebih tinggi dan operasi kendaraan otonom yang lebih baik secara keseluruhan.Kemampuan yang sama harus ada untuk industri Robot Bergerak.
Agar hal ini menjadi kenyataan, tantangan dalam aplikasi multi-modal, multi-kamera, termasuk sinkronisasi sensor dan fusi, harus dikurangi.Satu-satunya cara untuk mengurangi Total Biaya Kepemilikan untuk platform persepsi adalah dengan menyederhanakan desain dan integrasi sistem multi-modal.
Platform persepsi O3R dirancang untuk memenuhi tugas ini.
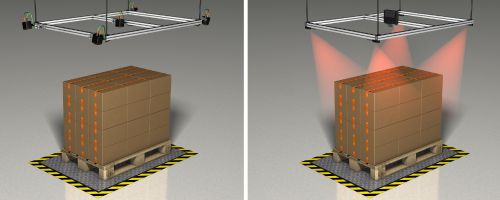
Platform O3R adalah solusi yang komprehensif untuk pemrosesan gambar dan informasi sensor secara terpusat dan tersinkronisasi pada robot bergerak otonom, seperti AGV. Integrasi yang mudah dan interaksi yang andal antara kamera dan sensor memungkinkan implementasi optimal untuk fungsi yang relevan, seperti pencegah benturan, navigasi, dan penentuan posisi. Selain itu, analisis dan penentuan dimensi objek statis dapat diimplementasikan dan ditangani lebih efektif dengan beberapa kamera. Contohnya meliputi pengukuran palet, batang kayu, paket, atau koper.
Kepala kamera dengan perangkat pencitraan yang dikembangkan internal

ifm menawarkan kepala kamera performa tinggi dan sesuai sebagai bagian dari solusi platform: Kamera 2D/3D memiliki sudut bukaan 60° atau 105° dan dilengkapi dengan perangkat pencitraan time-off-light terbaru dari pmdtechnologies ag. Perusahaan yang merupakan bagian dari grup ifm ini mengembangkan semua sensor untuk produk visibilitas dari spesialis otomatisasi dan menyesuaikannya secara presisi sesuai dengan persyaratan. Berkat cahaya inframerah yang dimodulasi, kamera 2D/3D mendeteksi objek dengan keandalan maksimum, meskipun dengan kondisi terpapar cahaya sekitar yang tinggi.
Andal dan terbuka: unit sentral untuk pemrosesan sinyal sensor

Komponen inti dari sistem ini adalah unit komputasi yang andal yang disebut Video Processing Unit (VPU). Komponen inti ini berbasis pada Yocto Linux dan NVIDIA Jetson TX2 serta mendukung lingkungan pengembangan terbuka seperti ROS dan Docker. Unit komputer bisa dihubungkan hingga ke enam kepala kamera. Sensor tambahan, seperti sensor ultrasonik untuk mendeteksi permukaan kaca seperti pintu atau dinding partisi, dapat dihubungkan melalui interface Gigabit Ethernet. Semua “pendeteksian” yang relevan yang dibutuhkan AGV untuk navigasi otonom yang aman tersedia pada titik sentral.
Arsitektur software O3R memfasilitasi pengembangan awal dan rangkaian pengembangan melalui pemilihan banyak peralatan software dan dukungan dari berbagai interface. Dengan menggunakan arsitektur Docker, lingkungan pengembangan terbuka seperti Python, ROS, CUDA dan C ++ dapat didukung.
| Linux adalah OS yang paling umum digunakan dalam robotika.Perangkat dengan fungsi pendukung harus memiliki kesamaan bahasa. | |
| Berkat Containers, pengembang memiliki fleksibilitas penuh dalam bahasa dan lingkungan pemrograman. Waktu pengembangan berkurang apabila menggunakan lingkungan software yang sudah dikenal. | |
 |
ROS adalah middleware yang umum digunakan dalam pengembangan.ROS2 menyediakan potensi untuk beralih dari pengembangan ke penerapan. |
| Alat-alat canggih seperti CUDA dan Jetpack dapat digunakan dengan sepenuhnya pada VPU berbasis NVIDIA. |