- Encoder
- Teknologi
Teknologi encoder
Teknologi magnetik
Encoder magnetik menggunakan sensor efek Hall untuk mendeteksi gerakan rotasi. Sensor mendeteksi orientasi magnet permanen yang terpasang pada poros. Kemudian, mikroprosesor menghitung sudut rotasi poros dari sinyal sensor. Karena prinsip mekanisnya yang simpel, encoder magnetik lebih kecil dan jauh lebih kokoh daripada encoder optik.
Juga dalam hal performa pengukuran, encoder generasi baru berbasis magnetik kini dapat mengimbangi encoder optik: Berkat mikroprosesor yang andal, software pemrosesan sinyal yang telah dioptimalkan dan kompensasi suhu yang diterapkan, tingkat presisi pengukuran ditingkatkan lebih baik daripada 0,1 derajat. Deviasi akibat kondisi termal dikurangi hingga level minimum. Selain itu, waktu respons encoder, yang sebelumnya dalam kisaran antara 700 dan 1.400 mikrodetik, telah dikurangi ke level yang mendekati nol mikrodetik yang menawarkan karakteristik respons dari encoder optik.
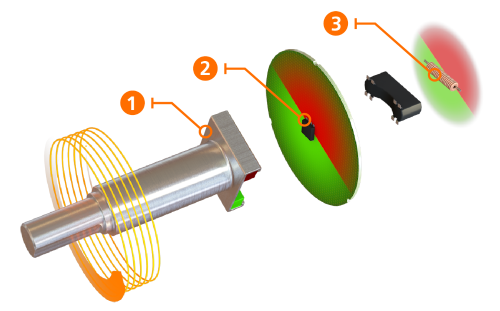
Tidak ada nilai yang hilang: efek Wiegand
Encoder magnetik mendeteksi rotasi pada sudut antara 0 dan 360 derajat, tetapi sensor efek Hall tidak dapat mendeteksi jumlah putaran penuh tanpa suplai daya eksternal. Di sinilah sistem pengumpulan energi terintegrasi yang berbasis pada efek Wiegand digunakan dan mengirim pulsa tegangan yang andal dan singkat ke sirkuit penghitung putaran. Ini berarti encoder juga dapat secara andal mendeteksi dan menyimpan putaran kecepatan rendah tanpa suplai daya eksternal. Dengan demikian alokasi posisi yang salah akibat rotasi poros di luar waktu mesin beroperasi dapat dihilangkan, misalnya, akibat hilangnya tekanan pada mekanisme pengangkatan.
Teknologi optik
Sensor sinar tembus memancarkan cahaya melalui slot yang ditempa pada disc kaca yang dilapisi. Pulsa dihasilkan saat sinar dihentikan.
- Encoder optik sangat presisi.
- Encoder optik merupakan unit yang sangat kompleks yang terdiri dari banyak komponen terpisah.
- Produksi disc kaca yang dilapisi sangat sulit dan berbiaya mahal. Dibandingkan encoder dengan teknologi magnetik, encoder ini mudah pecah apabila terkena guncangan dan getaran.
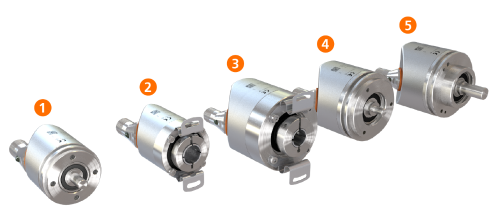
Sekilas tentang tipe flensa dan poros
- Tipe RB / RMB sebagai flensa sinkronisasi dengan poros 6 mm
- Tipe RA / RMA sebagai flensa langsung dengan poros berongga
- Tipe RO / RMO sebagai flensa langsung dengan poros berongga
- Tipe RU / RMU sebagai flensa sinkronisasi dengan poros solid 6 mm
- RV / RMV sebagai flensa klem dan poros solid 10 mm
Desain poros
Poros solid
Encoder dengan poros solid dipasang pada poros mesin yang berputar dengan diameter yang sama atau serupa dengan menggunakan koneksi penghubung. Koneksi ini mengkompensasi offset mekanis di antara dua poros, sehingga mencegah keausan dini. Hal ini membuat kombinasi ini sangat cocok untuk aplikasi yang menerima guncangan atau getaran biasa.
Poros berongga
Encoder poros berongga dipasang langsung pada poros yang berputar. Koneksi poros tidak diperlukan sehingga memudahkan perakitan. Sebagai gantinya, digunakan flensa pemasangan yang fleksibel, yang disebut koneksi stator yang akan mengkompensasi sedikit ketidaksejajaran pemasangan. Encoder dengan poros berongga yang terbuka ke satu sisi tidak memiliki lubang pemasangan.
Diameter poros dan ukuran konstruksi
Diameter poros yang tepat penting untuk memastikan poros yang masuk ditahan secara presisi di tempatnya.
Diameter umum untuk poros solid adalah 6 mm, 8 mm, dan 10 mm.
Diameter umum untuk poros berongga yang terbuka ke satu sisi adalah antara 6 dan 15 mm. Untuk fleksibilitas diameter yang tinggi, selongsong adaptor 6 hingga 14mm dimasukkan ke dalam poros berlubang.
Diameter luar encoder umumnya dinyatakan sebagai ukuran konstruksi. Encoder ifm tersedia dalam ukuran 36 hingga 58 mm.