- Encoder
- Aplikasi
Contoh aplikasi
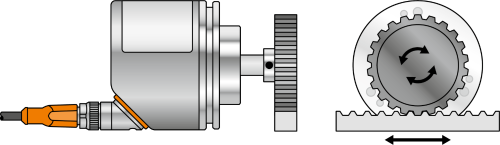
Gerakan rotasi, ketinggian, dan linier
Misalnya: Penentuan ketinggian lift menggunakan encoder multiturn absolut pada roda gerigi.
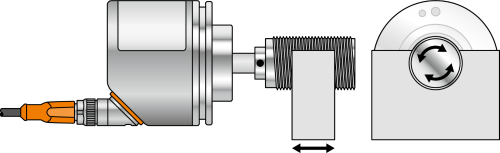
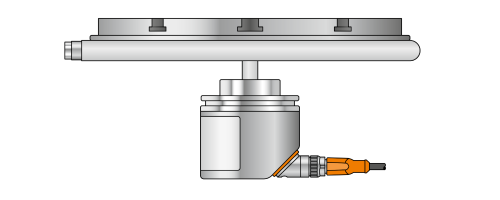
Gerakan rotasi dan jarak
Misalnya: Penyesuaian spindel untuk penentuan posisi yang presisi menggunakan encoder multiturn absolut.
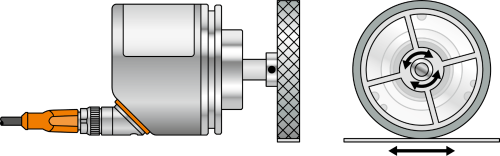
Gerakan rotasi dan linear
Misalnya: Pengukuran linear dengan menggunakan encoder inkremental pada roda pengukur.
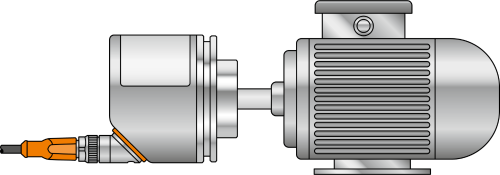
Gerakan rotasi untuk penentuan kecepatan
Misalnya: Deteksi kecepatan rotasi motor dengan menggunakan encoder inkremental.
Gerakan rotasi untuk penentuan posisi
Misalnya: Penentuan posisi rotary indexing table untuk langkah produksi yang berbeda dengan menggunakan encoder singleturn absolut.
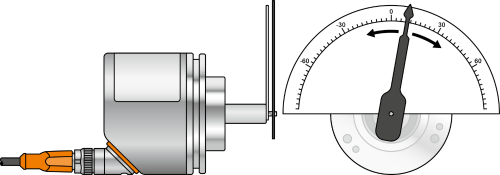
Gerakan rotasi untuk penentuan sudut
Misalnya: Deteksi sudut kemudi untuk pengoperasian AGV menggunakan encoder singleturn absolut.
Penggunaan pada forklift dan AGV
Encoder multiturn IO-Link yang ringkas terutama cocok untuk digunakan pada AGV dan forklift. Casing berdiameter kecil sebesar 36 mm memungkinkan instalasi dengan jejak yang kecil. Casing ini dapat dihubungkan ke semua pengontrol yang umum menggunakan master IO-Link tipe AL1xx dan kabel M12 standar. Dengan demikian, tidak diperlukan lagi memasang kabel fielbus yang mahal.
Penyesuaian lebar garpu
Lebar garpu forklift disesuaikan menggunakan roda gigi dan rack. Encoder absolut yang dipasang pada roda gigi menentukan lebar garpu secara tepat dan melaporkannya ke pengontrol.
Tinggi garpu
Untuk menentukan tinggi garpu secara presisi, encoder absolut mendeteksi putaran pada puli tali kawat dan mengirim informasi ini ke unit display dan pengontrol.
Roda penggerak dan kemudi
Dua encoder dipasang pada sistem kemudi: Sementara encoder yang satu secara presisi menentukan sudut roda kemudi, encoder yang lain di poros motor penggerak memberikan dua nilai proses: kecepatan rotasi dalam min-1 dan posisi roda yang tepat.
Mesin lainnya
Pemotongan lembaran pada mesin pelubang
Lembaran logam yang tak terbatas berjalan melewati mesin dan dilubangi sesuai panjang yang telah ditentukan. Sensor fotoelektrik melihat bagian tepi depan lembaran dan memulai proses penghitungan dengan mengatur encoder pada roda pengukur ke nol melalui sinyal peralihan. Input reset secara langsung pada encoder ifm ini berarti tidak melibatkan PLC. Meskipun dalam proses yang cepat, penundaan waktu dan perpindahan mekanis yang dihasilkan dapat dihindari secara efektif. Selain pengukuran panjang, encoder IO-Link memberikan kecepatan sabuk sebagai nilai pengukuran kedua.
Pemantauan kipas
Dipasang pada poros kipas, encoder tidak hanya memantau kecepatan. Encoder ini juga mencatat jam operasi untuk membantu mengoptimalkan interval pemeliharaan.
Mesin pengemasan Thermoforming
Sabuk konveyor harus bekerja secara sinkron dengan lapisan film untuk feeding. Encoder yang dipasang pada roda pengukur memantau kecepatan secara presisi dan melaporkan meskipun ada deviasi terkecil sekalipun ke pengontrol.
Konveyor roller
Jalur konveyor panjang terdiri atas segmen yang digerakkan secara terpisah dan individual. Untuk mencegah kemacetan atau benturan, encoder dipasang pada sumbu penggerak untuk memastikan semuanya beroperasi pada kecepatan yang sama.
Konveyor atas kepala
Di rumah-rumah jagal, setengah struktur yang tergantung pada kait dipindahkan dari konveyor atas kepala ke sabuk penyimpanan. Untuk memastikan transfer berjalan dengan yang lancar, kedua sistem mutlak harus bekerja secara sinkronis. Encoder pada kedua sistem memastikan agar sinkronisasi sistem sempurna. Berkat casing V4A dan peringkat perlindungan IP68/69K, encoder bisa tahan meskipun pada proses pembersihan ekstrem yang digunakan di rumah-rumah jagal.