PDS:n käyttöönotto
Avain minkä tahansa ratkaisun menestyksekkääseen käyttöönottoon on kaikkien vaatimusten ymmärtäminen. PDS ei tässä suhteessa eroa muista. Tämä kappale sisältää kaikki yksityiskohdat, jotka tarvitaan PDS:n menestyksekkäässä käyttöönotossa. Näitä ovat:
- Asennuspaikka:
Mihin ja miten kamera pitäisi asentaa ajoneuvoon. - Kaapelointi:
Miten PDS-järjestelmä kaapeloidaan (jännitesyöttö/tiedonsiirto). - Ohjelmistoliitäntä:
Miten PDS-järjestelmä liitetään ajoneuvon ohjausjärjestelmään. - Tunnistettavat lavatyypit:
Minkätyyppisiä kuormalavoja PDS-standardiratkaisulla voidaan tunnistaa.
Näiden askelien seuraaminen varmistaa menestyksekkään PDS-käyttöönoton.
PDS-ratkaisu

Asennuspaikka:
Kallistus

Asennuskorkeus

Kaapelointi
PDS on sisäänrakennettu O3D-kameraan. Tämä kamera tarvitsee 24 VDC jännitesyötön ja se kommunikoi Ethernet-väylän kautta. Molempien liitäntöjen kytkentä selviää seuraavasta kuvasta:
Liitin: 1 x M12 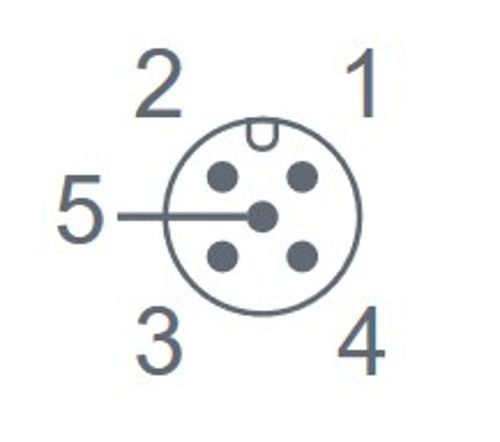 Sähköinen kytkentä: Prosessiliitäntä |
Liitin: 1 x M12 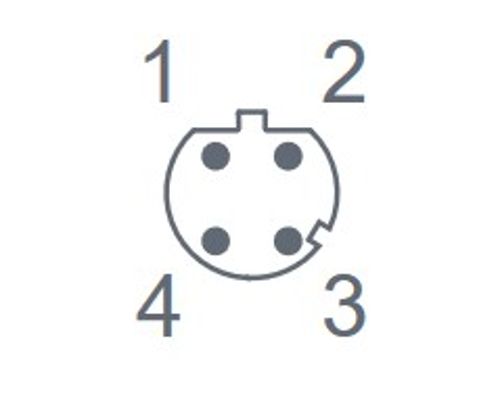 Sähköinen kytkentä: Ethernet |
|---|---|
| 1. U+ | 1. TD+ |
| 2. Liipaisutulo | 2. RD+ |
| 3. GND | 3. TD- |
| 4. Binäärilähtö 1 valmis | 4. RD- |
| 5. Binäärilähtö 1 ketjutus |
Huom: Kameran ottama maksimivirta kuvanottohetkellä on 2,4 A.
Tunnistettavat kuormalavatyypit
PDS on suunniteltu tunnistamaan kuormalavoja, joissa on kaksi taskua. Lavat erotellaan kehälavoihin "block pallet" ja jalkalavoihin "stringer pallet".
PDS:ää voidaan käyttää seuraavien 2-taskuisten lavatyyppien tunnistamiseen:
 Puu, kehälava |
 Puu, jalkalava |
 Vaneri, jalkalava |
 Kaksipuolinen |
 Käännettävä |
 Kaksitielava |
 GMA nelitielava |
 Yksipuolinen, jalkalava |
 CHEP |
 PECO |
 Muovi |
 Pinottava, muovi |
 IGPS |