- Sensores de inclinación
- Tecnología
Tecnología de los sensores de inclinación
El «nivel de burbuja electrónico»
La gran mayoría de los sensores de inclinación (también denominados inclinómetros, transductores angulares o sensores de ángulo) disponibles actualmente en el mercado están equipados con un acelerómetro MEMS multieje (MEMS por sus siglas en inglés = sistema microelectromecánico).
Este tipo de células de medición son muy pequeñas, muy precisas, extremadamente robustas y, al mismo tiempo, no presentan desgaste ni requieren mantenimiento.
En resumen, una célula de medición MEMS consta de dos componentes principales:una parte electrónica móvil y una parte mecánica fija.
La parte interior móvil, formada por una masa de prueba (masa sísmica), está equipada en el borde exterior con electrodos suspendidos de unos resortes.
La parte exterior fija de la célula de medición también cuenta con estos electrodos.
Estos electrodos, situados a una distancia mínima entre sí, forman una especie de peine.
Cuando el sensor está en posición horizontal, el eje Z del sensor suele encontrarse en paralelo al vector tierra. Por tanto, su valor es cero absoluto.
Si el sensor se inclina en una dirección, la posición de la masa móvil en el interior cambia y, por tanto, también la de su electrodo en relación con el electrodo fijo.

Vista detallada de la célula MEMS
- Movimiento (= aceleración)
- Peines de electrodos a una distancia de ~1,3µm entre sí
El cambio resultante en la capacitancia entre estos dos electrodos es registrado por la célula de medición y utilizado como base para el cálculo posterior del valor final del ángulo.
¡IMPORTANTE!
Cada sensor de inclinación se suministra de fábrica con una calibración absoluta.
Como referencia se utiliza el vector de gravedad, es decir, la aceleración de la gravedad, 1g (= 9,81m/s²).
Si un eje de medición del sensor está paralelo o coincide con el vector tierra, no podrá realizarse ninguna medición angular; el sensor carece de orientación en esta posición. En consecuencia, no será posible la medición directa del ángulo (detección de la rotación) alrededor del eje vertical de referencia (el llamado ángulo de guiñada).Sin embargo, este ángulo de guiñada puede calcularse de forma indirecta y externa en un PLC.
Véase «Funciones adicionales del sensor de inclinación dinámico [JDxxxx]».
Definición de los ángulos
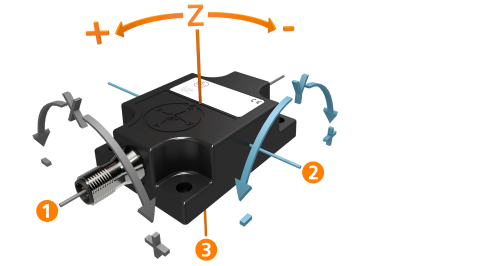
Definición del ángulo en la posición cero Eje Z = vector de gravedad
- Eje Y «Roll» (longitudinal) ⇒ ángulo X
- Eje X «Pitch» (lateral) ⇒ ángulo Y
- Eje Z «Yaw» (vertical) ⇒ ángulo Z