PDS의 통합
어느 솔루션이든 성공적인 구현의 열쇠는 모든 요구사항을 확실하게 이해하는 것 입니다. PDS 또한 다르지 않습니다. 이 섹션에서는 PDS를 성공적으로 구현하는데 필요한 모든 상세정보를 제공합니다. 여기에 다음 사항이 포함됩니다:
- 마운팅 위치:
카메라가 차량에 마운팅되는 위치와 방법 - 배선:
PDS 솔루션이 어떤 방식으로 배선 (전원 공급 / 통신) - 소프트웨어 인터페이스:
PDS 솔루션이 차량 컨트롤러에 연결되는 방식 - 감지가능한 팔레트 타입:
표준 PDS 솔루션으로 감지 가능한 팔레트 타입
이 단계를 따르면, PDS가 성공적으로 구현될 수 있습니다.
PDS 솔루션

마운팅 위치:
경사도

마운팅 높이

배선
PDS는 O3D 카메라에 통합되어 있습니다. 이 카메라는 24V DC 전원공급을 필요로 하며, 이더넷을 통하여 통신합니다. 다음 그림에 양쪽 인터페이스의 배선이 있습니다:
커넥터: 1 x M12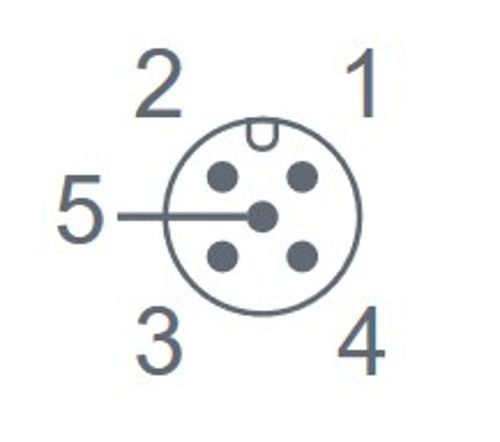 전기적 연결: 프로세스 커넥션 |
커넥터: 1 x M12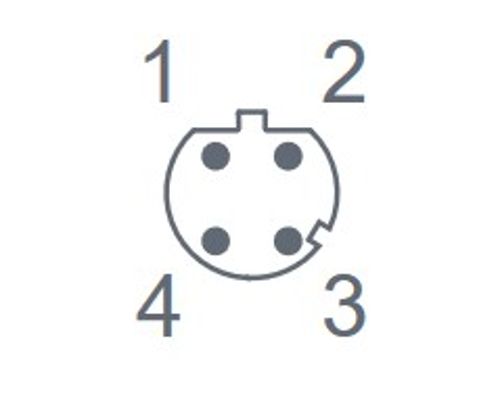 전기적 연결: 이더넷 |
|---|---|
| 1. U+ | 1. TD+ |
| 2. 트리거 입력 | 2. RD+ |
| 3. GND | 3. TD- |
| 4. 스위칭 출력 1 준비 | 4. RD- |
| 5. 스위칭출력 1 캐스캐이딩 |
참고: 카메라는 이미지 캡처 하는 동안 2.4 A 피크 전류를 필요로 합니다.
감지가능한 팔레트 타입
PDS는 2개의 팔레트 포켓을 가진 팔레트를 감지하도록 디자인되었습니다. "블록"과 "스트링거" 팔레트가 구별됩니다.
PDS를 사용하여 다음 2 포켓 팔레트 형상 / 타입 감지가 가능합니다:
 목재, 블록 |
 목재, 스트링거 |
 함판, 스트링거 |
 양면의 |
 가역성있는 |
 2-way |
 GMA 4-way |
 편면, 스트링거 |
 CHEP |
 PECO |
 플라스틱 |
 중첩 가능, 플라스틱 |
 IGPS |