- 編碼器
- 技術
編碼器技術
磁性技術
磁性編碼器會使用霍爾效應感測器來偵測旋轉運動。編碼器會偵測一顆安裝於軸上永久磁鐵的去向。然後,微處理器會根據感測器訊號來計算軸的旋轉角度。由於採用如此簡易的機械原理,磁性編碼器體積小於光學編碼器,耐力也強韌許多。
若論及測量性能,最新一代的磁性原理編碼器性能與光學編碼器相比,已經毫不遜色。受惠於強大的微處理器、最佳化的訊號處理軟體與整合的溫度補償,測量的精準度已經達到不超過 0.1 度的誤差。溫度狀態導致的誤差已經降到最低。此外,編碼器的反應時間過去是在 700 到 1400 微秒,如今則已經縮短至接近零微秒,達到等同於光學編碼器的性能。
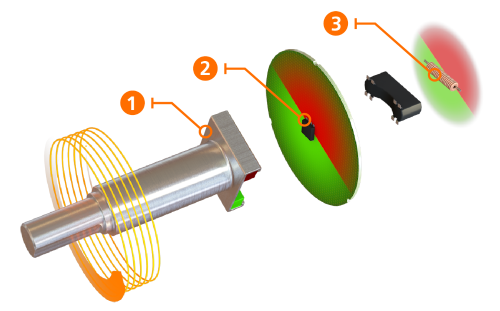
1) 磁鐵 2) 霍爾感測器 3) 韋根纜線
沒有數值會遺失:韋根效應
雌性編碼器偵測 0 到 360 度的旋轉角度,但霍爾感測器若沒有外部電源,就無法偵測完整迴轉的次數。因此,整合能源採集系統便在此派上用場,此系統是基於韋根效應設計,並且為迴轉計數器電路提供短暫而強大的電壓脈衝。因此即使感測器沒有外部電源,也能可靠地偵測並儲存慢速的迴轉。此功能可以確保避免停機時間發生旋轉導致的錯誤配置位置,例如失壓的舉重機制等等。
光學技術
對射型光電感測器將光照射至一片塗層玻璃碟片上蝕刻的空隙中。在光線中斷時,即會產生脈衝。
- 光學編碼器非常精準。
- 光學編碼器是無比複雜的儀器,其中包含大量獨立零件。
- 塗層玻璃碟片的生產工序艱難且要價不斐。與磁性編碼器相較起來,光學編碼器遭遇任何衝擊或震動都很容易毀損。
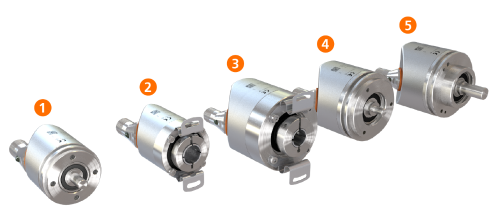
一眼看懂法蘭與軸類型。
- RB / RMB型號為同步法蘭與6mm軸
- RA / RMA型號為直接法蘭與空心軸
- RO / RMO型號為直接法蘭與空心軸
- RU / RMU型號為同步法蘭與6mm實心軸
- RV / RMV型號為夾緊法蘭與10mm實心軸
軸的設計
實心軸
具備實心軸的編碼器透過軸聯結器,與相同或相似直徑的機軸聯結。這些軸聯結器會補償兩軸之間的差異,以此提防過早的磨損。因此,這種類型的配置相當適用於經常遭受衝擊或震動的應用。
空心軸
空心軸編碼器會直接安裝於旋轉的軸上。此編碼器不需要軸聯結器,因此無須另外組裝。取而代之的是彈性的安裝法蘭,這被稱作定子聯結,並且能補償少量的安裝錯位。單邊開放的空心軸編碼器並無穿過機體的安裝孔。
軸直徑與建置大小。
正確的軸直徑非常重要,這點將會確保聯結的軸能精確地固定在正確位置。
常見的實心軸直徑為6mm、8mm與10mm。
常見的單邊開放空心軸直徑分布在6mm 至15mm之間。為了適應更廣大範圍的直徑,6至14mm的套筒適配器會被放入空心軸。
編碼器的外部直徑通常被稱為建置大小(construction size)。宜福門編碼器的大小介於36 mm到58mm之間。