- Разпознаване на 3D обекти
- Платформа O3R Perception
Платформа O3R Perception
Платформата за възприятие с един поглед
Платформата O3R perception е шлюз с множество сензори и камери с размера и структурата на разходите на потребителските продукти - с дългосрочната наличност и стабилност на промишлените продукти. До шест камерни глави могат да бъдат свързани към централния процесор чрез FPD връзка и допълнителни сензори като радар или лидар могат да бъдат свързани чрез Gigabit Ethernet интерфейс. Благодарение на гъвкавата монтажна позиция и подредба, могат да се сканират променливо различни области и например могат да бъдат предотвратени сблъсъци с препятствия, които излизат на пътя на движение над зрителното поле на скенера за безопасност.
Мощният централен изчислителен блок предлага достатъчно място за стартиране на вашите собствени алгоритми или за използване на готови функции като избягване на сблъсък или откриване на палети.
Теми
Най-висока степен на автоматизация в автомобилната индустрия
Индустрията за автономни превозни средства (AV) преследва автономност от ниво 5, пълна автоматизация, при която не се изисква взаимодействие с водача, което би позволило на обикновен потребител да закупи AV.
- Производителите признават, че ниво 5 е постижимо само скомплекс за възприятия, който позволява на превозното средство да възприема по-добре околната среда.
- Мултимодален подход за възприятие около превозното средство.
- Всяка модалност е предназначена да преодолее „слабостта“ на друга модалност, създавайки стабилна платформа за най-добрата в своя клас екологична осведоменост.
Предизвикателства в мобилната роботика
Автономията не е нова за мобилната роботика (за първи път е въведена през 1950-те години).
- За разлика от AV индустрията, разходните точки са пречка за приемането на мобилни роботи.
- Входните точки за мобилни роботи изискват голяма инвестиция от потребителя, което увеличава времето за постигане на силна възвръщаемост на инвестициите.
- Производителите са принудени да направят компромис при избора на хардуер, като се фокусират основно върху безопасността, за да намалят разходите за списъка на материалите (BoM).
- В крайна сметка това ограничава общата гъвкавост на робота, което от своя страна намалява неговите възможности.
Ами ако не трябваше да правите компромиси?
Вземете страница от AV „книгата“
AV индустрията не греши в подхода си за достигане на 5-то ниво автономност.По-добрата осведоменост за околната среда води до повече гъвкавост и по-добра цялостна работа на AV.Същата способност трябва да съществува и за индустрията за мобилни роботи.
За да стане това реалност, предизвикателствата в мултимодалните приложения с множество камери, включително синхронизирането и синтеза на сензори, трябва да бъдат ограничени.Единственият начин за намаляване на общата цена на собственост за платформите за възприятие е да се опрости проектирането и интегрирането на мултимодални системи.
Платформата O3R Perception е проектирана да изпълни тази задача.
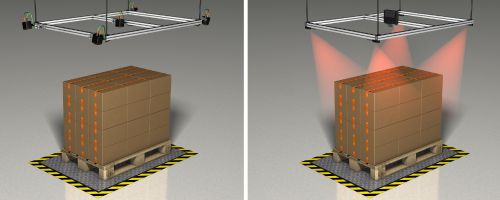
Платформата O3R Perception е цялостното решение за централизирана, синхронизирана обработка на информация за изображения и сензори в автономни мобилни роботи, такива като AGV. Опростената интеграция и надеждното взаимодействие на камерите и сензорите позволяват стабилно изпълнение на съответните функции като избягване на сблъсък, навигация и позициониране. В допълнение, анализът и оразмеряването на стационарни обекти могат да бъдат приложени и се управляват по-ефективно с помощта на няколко камери. Примерите включват измерване на палети, трупи, опаковки или куфари.
Глава на камерата със собствено устройство за изобразяване

ifm предлага подходящи, високопроизводителни глави за камери като част от решението на платформата: 2D/3D камерите имат опционален ъгъл на бленда от 60° или 105° и са оборудвани с най-новата камера за изключване на светлина от pmdtechnologies ag. Тази компания от групата компании на ifm разработва всички сензори за визуалните продукти на специалистите по автоматизация и ги адаптира точно към съответните изисквания. Благодарение на модулираната инфрачервена светлина, 2D/3D камерата открива обекти с максимална надеждност дори при повишено излагане на околна светлина.
Мощен и отворен: централният блок за сензорна обработка

Ядрото на системата е мощен изчислителен блок, наречен Блок за обработка на видеоизображения (Video Processing Unit (VPU)). Той е базиран на Yocto Linux и NVIDIA Jetson TX2 и поддържа отворени среди за разработка като ROS и Docker. Към изчислителния блок могат да бъдат свързани до шест глави на камери. Допълнителните сензори, като ултразвукови сензориза откриване настъклени повърхности, като врати или преградни стени, могат да бъдат свързани чрез Gigabit Ethernet интерфейс. По този начин всички съответни „сетива“, от които AGV се нуждае за безопасна автономна навигация, са достъпни в централна точка.
Софтуерната архитектура на O3R улеснява както предварителната разработка, така и разработването на серии чрез богат избор от софтуерни инструменти и поддръжка от множество интерфейси. Чрез използването на архитектура на Docker се поддържат отворени среди за разработка на програми като Python, ROS, CUDA и C ++.
| Linux е най-често използваната ОС в роботиката.Допълнителните устройства трябва да говорят на същия език. | |
| Контейнерите позволяват на разработчика пълна гъвкавост в езика за програмиране и средата. Времето за разработка се намалява при използване на позната софтуерна среда. | |
 |
Операционната система за роботи - ROS - е често срещан мидълуер, използван при разработката.ROS2 предоставя потенциал за преминаване от разработка към внедряване. |
| Мощни инструменти като CUDA и Jetpack са напълно разгръщани на базирания на NVIDIA VPU. |