Rotary encoders convert rotational motion into digital signals
Encoders for every application
Rotary encoders are widely used in manufacturing and production processes to indicate precise positioning of linear distance, speed, angular displacement and direction of rotation.
Traditional optical encoders are susceptible to damage from impact.
ifm encoders use magnetic technology and are more robust, not easily damaged by impact or vibration. Embedded IO-Link technology provides process transparency.
Magnetic encoders

Magnet rotates over chip, pulses generated by changes in the magnetic field
Optical encoders

Pulses generated when light from through-beam optical sensors passes through gaps in a glass disk
| Magnetic technology | Optical technology |
|---|---|
| High resolution and accuracy comparable to optical encoders in a smaller package with a lower price point | High resolution and accuracy but difficult and expensive to manufacture |
| Fewer components for more robust solution | Multiple parts, including glass disc, are prone to breaking in high shock and vibration applications |
| Programmable resolution and output | Fixed resolution and output |
| Models available with IO-Link for process transparency |
Encoder types
ifm offers both incremental and absolute encoders, in solid and hollow shaft configurations, with and without display, and with and without IO-Link.
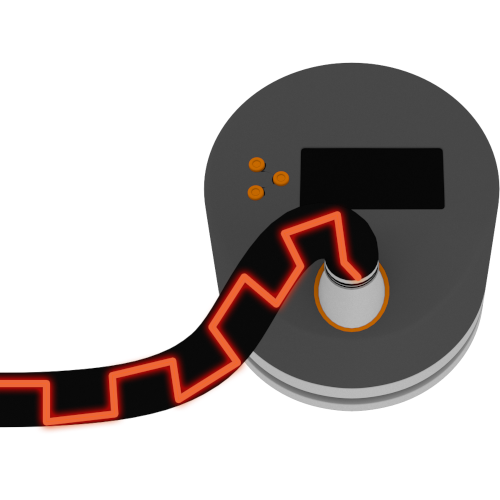
Incremental encoders
Incremental encoders generate a specific number of pulses as the shaft makes a complete revolution. The more pulses per revolution, the fine the resolution of the encoder. Incremental encoders simply provide a series of digital signals corresponding to speed, direction or distance traveled.
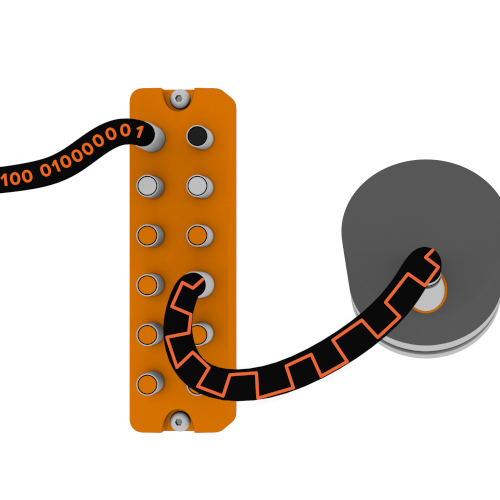
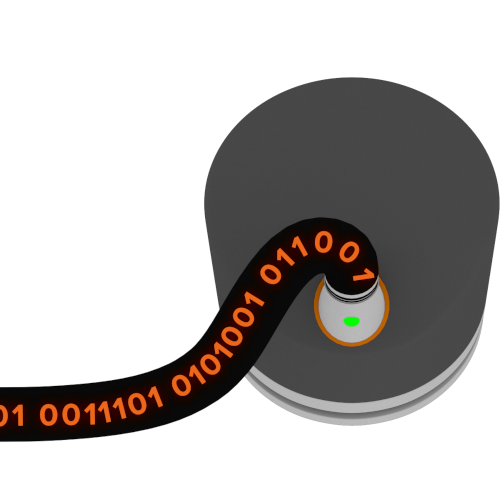
Absolute encoders
Absolute encoders provide a unique numerical value for each angular position of the shaft. They are used in applications requiring highly accurate information on distance, speed, direction and absolute position.
Absolute encoders are further divided into single-turn and multi-turn.
 Incremental encoders |
|
 Absolute single-turn encoders |
|
 Absolute multi-turn encoders |
|
| Incremental | Incremental via IO-Link |
Absolute single-turn | Absolute multi-turn | Absolute multi-turn via IO-Link | |
|---|---|---|---|---|---|
| Speed | |||||
| Resolution | |||||
| Revolutions | 1 | 1 | 1 | 1 / ∞ | 1 / ∞ |
| Position values | Relative | Absolute | Absolute | Absolute | Absolute |
| IO-Link infrastructure required | |||||
| Position memory after power break | |||||
| Fieldbus compatibility | |||||
| Noise immunity | |||||
| Settings required |