- Lutningsgivare
- Teknologi
Lutningsgivarteknik
Det "elektroniska vattenpasset"
De flesta lutningsgivare (även kallade lutningsmätare, tilt- eller vinkelgivare) som finns idag på marknaden har en fleraxlad MEMS accelerometer (MEMS = microelectromechanical system).
Dessa typer av mätceller är väldigt små, precisa och robusta såväl som slitage- och underhållsfria.
Enkelt uttryckt innehåller en MEMS-mätcell två huvudkomponenter: en rörlig elektronisk del och en fast mekanisk del.
Den rörliga inre delen består av en provmassa (seismisk massa) och är försedd med elektroder på den yttre kanten som är upphängda på fjäderelement.
Mätcellens fasta yttre del innehåller också dessa elektroder.
Dessa elektroder bildar en sorts "kam" med minimal distans till varandra.
När givaren befinner sig i horisontellt läge ligger givarens z-axel vanligtvis parallellt med jordvektorn. Därför är dess värde "absolut" noll.
Om givaren lutar i en riktning ändrar den rörliga massan och därför även dess elektrod på insidan positionen i förhållande till den fasta elektroden.

Detaljvy på en MEMS-cell
- Rörelse (= acceleration)
- Kamelektroder med ~1.3 µm avstånd till varandra
Den resulterande kapacitansändringen mellan dessa två elektroder upptäcks av mätcellen och används för att beräkna det slutliga vinkelvärdet.
OBS!
Varje lutningsgivare har en fabriksinställning med absolut kalibrering.
Referens som används är gravitationsvektorn, d.v.s. gravitationsaccelerationen 1g (= 9,81 m/s²).
Om givarens mätaxel är parallell eller kongruent med jordvektorn kan vinkelmätningen inte utföras; i detta läge saknar givaren orientering. En direkt vinkelmätning (rotationsdetektering) kring den vertikala referensaxeln (yaw- resp. girvinkel) är således omöjlig. Likväl kan girvinkeln beräknas indirekt via en extern PLC.
Se “Ytterligare funktioner hos den dynamiska lutningsgivaren [JDxxxx]”.
Vinkeldefinitioner
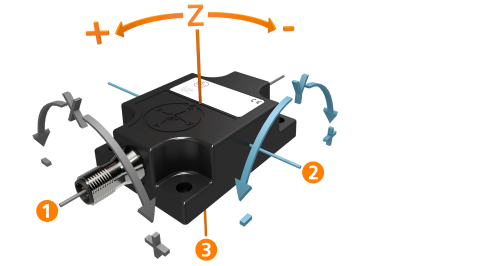
Vinkeldefinition med nolläge z-axel = gravitationsvektor
- y-axel “roll” (longitudinal) ⇒ vinkel x
- x-axel “pitch” (lateral) ⇒ vinkel y
- z-axel “yaw” (vertikal)⇒ vinkel z