- 3D prepoznavanje predmetov
- Robotska platforma O3R
Percepcijska platforma O3R
Kratki pregled percepcijske platforme
Percepcijska platforma O3R jest pristupnik s više senzora i kamera u strukturi veličine i troškova potrošačkih proizvoda – s dugotrajnom dostupnošću i čvrstoćom industrijskih proizvoda. Na središnju jedinicu za obradu može se spojiti do šest glava kamere putem poveznice FPD, a dodatni senzori kao što su radar ili oprema za detekciju svjetlosti i patroliranje (LIDAR) mogu se povezati putem sučelja Gigabit Ethernet. Zbog fleksibilnog položaja i rasporeda ugradnje, različita se područja mogu skenirati i, na primjer, mogu se spriječiti sudari s preprekama koje strše na putu vožnje iznad vidnog polja sigurnosnog skenera.
Snažna središnja rubna računalna jedinica pruža dovoljno prostora za pokretanje vlastitih algoritama ili za upotrebu gotovih funkcija kao što su izbjegavanje sudara ili otkrivanje paleta.
Najveći stupanj automatizacije u automobilskoj industriji
Industrija autonomnih vozila (AV) juri za autonomijom razine 5, potpunom automatizacijom u kojoj nije potrebna interakcija s vozačem, što bi općem potrošaču omogućilo kupnju autonomnih vozila.
- Proizvođači priznaju da se razina 5 može postići samo sa sklopom za percepciju kojim se vozilu omogućuje da bolje percipira okruženje.
- Multimodalni pristup za percepciju oko vozila.
- Svaki je modalitet osmišljen na način da prevlada „slabost” drugog modaliteta, stvarajući čvrstu platformu za najbolju ekološku svijest u razredu.
Izazovi u mobilnoj robotici
Autonomija nije novost u mobilnoj robotici (prvi je put predstavljena 1950-ih).
- Za razliku od industrije autonomnih vozila (AV), točke troškova prepreka su usvajanju mobilnih robota.
- Ulazne točke za mobilne robote zahtijevaju velika ulaganja korisnika, povećavajući vrijeme za postizanje snažnog ROI-ja.
- Proizvođači su prisiljeni pristati na kompromis u odabiru hardvera, usredotočujući se na sigurnost, kako bi smanjili troška BoM-a.
- U konačnici, time se ograničava cjelokupna fleksibilnost robota što zauzvrat smanjuje njegovu sposobnost.
Što ako ne trebate pristati na kompromis?
„Ugledajte se” na autonomna vozila
Industrija autonomnih vozila (AV) nije u krivu u svojem pristupu u dostizanju autonomije razine 5.Bolja ekološka svijest dovodi do veće fleksibilnosti i boljeg cjelokupnog rada autonomnih vozila.Ista bi sposobnost trebala postojati za industriju mobilnih robota.
Kako bi to postalo stvarnost, moraju se ublažiti izazovi u multimodalitetu, područjima primjene s više kamera, uključujući sinkronizaciju i fuziju senzora.Jedini način da se smanji ukupni trošak vlasništva za percepcijske platforme jest pojednostaviti dizajn i integraciju multimodalnih sustava.
Percepcijska platforma O3R osmišljena je da ispuni ovaj zadatak.
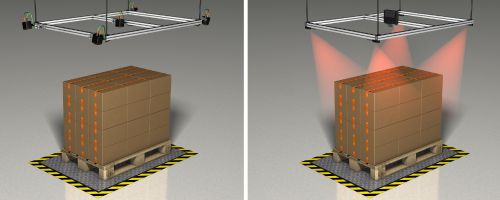
Platforma O3R sveobuhvatno je rješenje za centraliziranu, sinkroniziranu obradu slike i informacija senzora u autonomnim mobilnim robotima, kao što su AGV-ovi. Pojednostavljena integracija i pouzdana interakcija kamera i senzora omogućuje snažnu provedbu važnih funkcija kao što su izbjegavanje sudara, navigacija i postavljanje u položaj. Osim toga, može se provesti analiza i dimenzioniranje stacionarnih objekata, a njime se učinkovitije upravlja pomoću nekoliko kamera. Primjerima se uključuje mjerenje paleta, trupaca, paketa ili kovčega.
Glava kamere s uređajem za obradu slike koji je interno razvijen

ifm nudi prikladne, visokoučinkovite glave kamere u sklopu rješenja platforme: Dvodimenzionalne/trodimenzionalne kamere imaju po izboru kut otvora zaslona objektiva od 60° ili 105° i opremljene su najnovijim snimačem s načelom vremena preleta društva pmdtechnologies ag. Ovo društvo iz grupacije poduzeća ifm razvija sve senzore za vidne proizvode stručnjaka za automatizaciju i precizno ih prilagođava odgovarajućim zahtjevima. Zahvaljujući moduliranom infracrvenom svjetlu, dvodimenzionalna/trodimenzionalna kamera otkriva predmete maksimalnom pouzdanošću čak i uz povezanu izloženost ambijentalnom svjetlu.
Moćna i otvorena: središnja jedinica za osjetnu obradu

Jezgra sustava moćna je računalna jedinica koja se naziva jedinica za vizualnu obradu (VPU). Zasniva se na projektu Yocto Linux i računalnoj jedinici NVIDIA Jetson TX2 te podržava otvorena razvojna okruženja kao što su ROS i Docker. Na računalnu jedinicu može se povezati do šest glava kamera. Dodatni senzori kao što su ultrazvučni senzori za otkrivanje staklenih površina poput vrata ili pregradnih zidova mogu se povezati putem sučelja Gigabit Ethernet. Sva važna „osjetila” koja su potrebna AGV-u za sigurnu autonomnu navigaciju stoga su dostupna u središnjoj točki.
Arhitekturom softvera O3R olakšava se i predrazvoj i razvoj serije putem bogatog izbora softverskih alata i podrške brojnih sučelja. Upotrebom arhitekture Docker, podržavaju se otvorena razvojna okruženja kao što su Python, ROS, CUDA i C++.
| Linux je operativni sustav koji se najčešće upotrebljava u robotici.Pomoćni uređaji moraju pričati istim jezikom. | |
| Spremnici omogućuju razvojnom inženjeru potpunu fleksibilnost u jeziku i okruženju programiranja. Vrijeme razvoja smanjuje se pri upotrebi poznatog softverskog okruženja. | |
 |
ROS je uobičajeni međusoftver koji se upotrebljava u razvoju.ROS2 pruža potencijal za prelazak s razvoja na primjenu. |
| Moćni alati kao što su CUDA i Jetpack u potpunosti se mogu primijeniti na VPU na temelju računalne jedinice NVIDIA. |


 OVP800")
 OVP801")