- 3D物件辨識
- O3R機器人技術平台
汽車產業中最高等級的自動化
自動駕駛汽車(AV)產業追求等級五自動駕駛,即為無須駕駛互動的完全自動化,讓一般消費者也能購買自動駕駛汽車。
- 汽車製造商認為,唯有具備感知堆疊,讓汽車能夠提高對環境的感知,才能達到等級五。
- 車輛周邊多模態感知方法。
- 每個模態都是設計來克服另一個模態的「缺點」,為一流的環境感知建立一個強大的平台。
移動式機器人的挑戰
自動駕駛對於移動式機器人而言已不足為奇(在1950年代早已首次引進)
- 不同於自動駕駛汽車產業,採用移動式機器人的困難在於成本。
- 移動式機器人的引進門檻需要使用者大量的投資,導致投資回收期增加。
- 製造商被迫在硬體選擇上妥協,而主要專注於安全性,以降低BoM成本。
- 最終,這限制了機器人整體的靈活度,進而降低其能力。
如果您不必再妥協呢?
從自動駕駛汽車「取經」
自動駕駛汽車產業對於達到等級五自動駕駛的作法是正確的。更好的環境感知,能提升自動駕駛汽車的靈活度與整體操作。而這樣的能力也早該出現在移動式機器人產業中。
為了實現這點,必須減少多模態、多攝影機應用方面的挑戰,包含感測器同步與融合。而降低感知平台整體擁有成本的唯一方法,便是簡化多模態系統的設計與整合。
O3R感知平台則是專為達成此任務而設計。
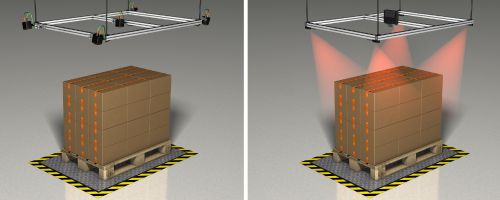
O3R平台是一個全方位解決方案,能夠集中、同步處理自動駕駛機器人(如AGV)的影像與感測器資訊。簡化的整合,以及攝影機與感測器間的可靠互動,允許了相關功能(如防碰撞、導航、定位)在實行上的耐用度。此外,對靜態的物品進行分析與量測尺寸也可以被引入,並且透過使用多個鏡頭提高處理效率。使用實例包含測量托板、木材、包裹或行李箱。
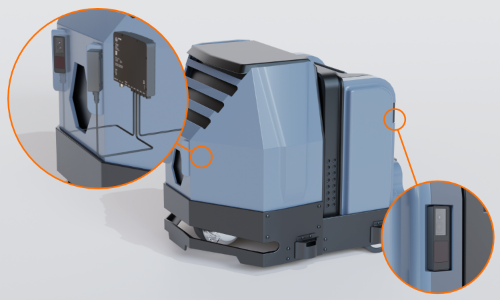
自行開發之具備成像器的攝影機鏡頭

宜福門為平台解決方案提供了更適合、高效能的 攝像頭:2D/3D 攝影機可以選擇孔徑角 60° 或 105°,且配備「pmdtechnologies ag.」最新的飛時測距成像器。這間公司是宜福門集團旗下的企業,專為自動化專家所用的視覺產品開發所有感測器,根據個別需求而精準調整。2D/3D 攝影機由於具備已調變的紅外線,即使周遭光線曝光度提高,也能以最大可靠度來偵測物品。
強大且開放:感官處理的中央裝置

此系統的核心是一個強大的計算裝置,稱為影像處理裝置(Video Processing Unit,VPU)。它是基於Yocto Linux與NVIDIA Jetson TX2,並且支援ROS和DOCKER等開放式開發環境。多達6台攝影機鏡頭可以連接至計算裝置。亦可透過十億位元乙太網路介面,連接額外的感測器,像是偵測玻璃表面(如門或隔牆)的超音波感測器。因此,所有AGV在安全自動駕駛上所需要的「感官」,都可以在一個中央點找到。
O3R軟體架構透過豐富的軟體工具選擇以及多個介面支援,提供預先開發以及系列開發。使用Docker架構,同時也支援開放式開發環境,像是Python、C++、CUDA以及ROS。
| 在機器人技術中,Linux是最常被應用的OS。而輔助設備必須要使用同一個語言。 | |
| 載具允許開發者在程式語言以及環境上有完整的靈活度。當使用熟悉的軟體環境時,能大幅減少開發時間。 | |
 |
ROS是在開發中常見的中介軟體。ROS2提供了從一個開發移轉到另一個開發的潛力。 |
| 而像是CUDA與Jetpack等強大的工具,都能在以NVIDIA為基礎的VPU上開發。 |