- Inclination sensors
- Technology
Inclination sensor technology
The “electronic spirit level”
Most of the inclination sensors (also called inclinometers, tilt or slope sensors) available on the market today feature a multi-axis MEMS accelerometer (MEMS = microelectromechanical system).
These types of measuring cells are very small, precise and robust as well as wear- and maintenance-free.
Put simply, a MEMS measuring cell consists of two main components:one movable electronic part and one fixed mechanical part.
The movable inner part, consisting of a proof mass (seismic mass), is equipped with electrodes on the outer edge, suspended by spring elements.
The fixed outer part of the measuring cell also features these electrodes.
The electrodes located at minimum distance to each other form a “comb”.
When the sensor is in a horizontal position, the z-axis of the sensor is usually parallel to the earth vector. Thus, its value is “absolute” zero.
If the sensor is tilted in one direction, the movable mass inside and its electrode will change position relative to the fixed electrode.

Detailed view of an MEMS cell
- Movement (= acceleration)
- Comb electrodes with ~1.3 µm distance to each other
The resulting change of capacitance between these two electrodes is detected by the measuring cell and used to calculate the final angle value.
IMPORTANT!
Each inclination sensor is factory-supplied with absolute calibration.
The reference used is the gravitational vector, i.e. the gravitational acceleration, 1g (= 9.81 m/s²).
If a measurement axis of the sensor is parallel or congruent with the earth vector, no angle measurement can take place; the sensor lacks orientation in this position. As a result, a direct angle measurement (rotation detection) around the vertical reference axis (yaw angle) is not possible.However, the yaw angle can be calculated indirectly via an external PLC.
See “Additional functionalities of the dynamic inclination sensor [JDxxxx]”.
Angle definitions
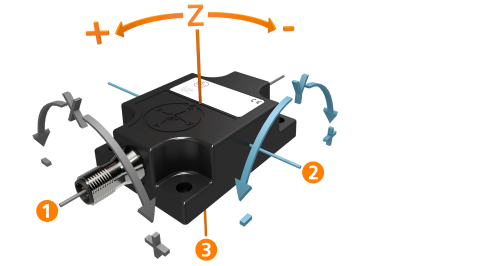
Angle definition with zero position z-axis = gravitational vector
- y-axis “roll” (longitudinal) ⇒ angle x
- x-axis “pitch” (lateral) ⇒ angle y
- z-axis “yaw” (vertical)⇒ angle z