- 3D nesne tanıma
- O3R Robot Sistemleri Platformu
O3R Kamera ve Sensör Plaftormu
Bir Bakışta O3R Algılama Platformu
O3R algı platformu, endüstriyel ürünlerin uzun vadeli kullanılabilirliği ve sağlamlığı ile, tüketici ürünlerinin boyut ve maliyet yapısında, bir çoklu sensör ve kamera ağ geçididir. FPD bağlantısı aracılığıyla merkezi işlem ünitesine altı adede kadar kamera kafası ve Gigabit Ethernet arayüzü üzerinden radar veya lidar gibi ek sensörler bağlanabilir. Esnek kurulum pozisyonu ve düzenlemesi sayesinde, değişken olarak farklı alanlar taranabilir ve örneğin, güvenlik tarayıcısının görüş alanının üzerinde seyahat yoluna çıkan engellerle çarpışmalar önlenebilir.
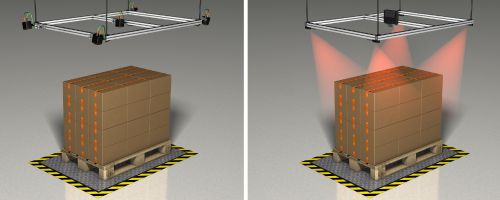
Güçlü merkezi uç bilgi işlem ünitesi, kendi algoritmalarınızı çalıştırmak, çarpışma önleme veya palet algılama gibi hazır işlevleri kullanmak için yeterli alan sunar.
Otomotiv endüstrisinde en yüksek derecede otomasyon
Bağımsız Araç (AV) endüstrisi, genel bir tüketicinin bir AV satın almasına olanak tanıyarak, sürücü etkileşiminin gerekmediği, tam otomasyon olan Seviye 5 otonominin peşinden koşmaktadır.
- Üreticiler, Seviye 5'in yalnızca aracın çevresini daha iyi algılamasına olanak tanıyan bir algılama yığını ile elde edilebileceğinin farkındadır.
- Aracın etrafındaki algılama için çok-duyulu yaklaşım.
- Her bir duyu, başka bir duyunun "zayıflığının" üstesinden gelmek için tasarlanmıştır ve sınıfının en iyisi olan bir çevre bilinci için sağlam bir platform yaratır.
Mobil robot sistemlerindeki zorluklar
Mobil Robot Sistemleri için otonomi yeni değildir (ilk olarak 1950'lerde tanıtıldı).
- AV endüstrisinin aksine, maliyet noktaları mobil robotların benimsenmesinin önünde bir engel teşkil etmektedir.
- Mobil robotlar için giriş noktaları, güçlü bir ROI (Yatırım Getirisi) elde etmek için gereken süreyi uzatan, kullanıcının büyük bir yatırım yapmasını gerektirir.
- Üreticiler, BoM (Ürün Ağacı) maliyetini düşürmek için öncelikle güvenliğe odaklanarak donanım seçiminden ödün vermek zorunda kalıyor.
- Sonuç olarak bu, robotun genel esnekliğini sınırlar ve bu da kapasitesini azaltır.
Ya taviz vermek zorunda olmasaydınız?
AV "kitabından" bir sayfa
AV endüstrisi, Seviye 5 Otonomiye ulaşma yaklaşımlarında hatalı değil.Daha iyi çevresel farkındalık, bir AV'nin daha fazla esnekliğe ve genel olarak daha iyi çalışmasına yol açar.Aynı yetenek Mobil Robot endüstrisi için de var olmalıdır.
Bunun gerçeğe dönüşmesi için, sensör senkronizasyonu ve füzyon dahil olmak üzere çok duyulu, çok kameralı uygulamalardaki zorlukların azaltılması gerekir.Algılama platformları için Toplam Sahip Olma Maliyetini düşürmenin tek yolu, çok duyulu sistemlerin tasarımını ve entegrasyonunu basitleştirmektir.
O3R algılama platformu bu görevi yerine getirmek için tasarlanmıştır.
O3R platformu, AGV'ler (Automated Guided Vehicle) gibi otonom mobil robotlarda, görüntü ve sensör bilgilerinin merkezi ve senkronize şekilde işlenmesi için kapsamlı bir çözümdür. Kameraların ve sensörlerin basitleştirilmiş entegrasyonu ve güvenilir etkileşimi, çarpışma önleme, navigasyon ve konumlandırma gibi ilgili işlevlerin sağlam bir şekilde uygulanmasını sağlar. Ek olarak, sabit nesnelerin analizi ve boyutlandırılması gerçekleştirilebilir ve birkaç kamera aracılığıyla daha etkin bir şekilde ele alınır. Örnekler arasında paletlerin, kütüklerin, paketlerin veya bavulların ölçülmesi sayılabilir.
Şirket içinde geliştirilen görüntüleyicili kamera kafası

ifm, platform çözümünün bir parçası olarak uygun, yüksek performanslı kamera kafaları sunar: 2D/3D kameralar 60° veya 105° gibi seçenekli açıklık açılarında mevcuttur ve pmdtechnologies ag üretimi ışık-uçuş-süresi görüntüleyiciye sahiptir. ifm şirketler grubuna ait bu şirket tüm sensörleri , otomasyon uzmanının görüntü ürünleri için geliştirir ve bunları ilgili gereksinimlere göre hassas bir şekilde uyarlar. Modüle edilmiş kızılötesi ışık sayesinde 2D/3D kamera, ortam ışığına daha fazla maruz kalınsa bile nesneleri maksimum güvenilirlikle algılar.
Güçlü ve Açık: Duyusal İşleme için Merkezi Ünite

Sistemin çekirdeği, Video Processing Unit (Video İşleme Ünitesi) (VPU) adı verilen güçlü bir bilgi işlem ünitesidir. Yocto Linux ve NVIDIA Jetson TX2'yi temel alır, ROS ve Docker gibi açık geliştirme ortamlarını destekler. İşlem ünitesine altı adede kadar kamera kafası bağlanabilir. Kapılar veya bölme duvarları gibi cam yüzeylerin algılanması için ultrasonik sensörler gibi ek sensörler, bir Gigabit Ethernet arayüzü üzerinden bağlanabilir. Bu nedenle, bir AGV'nin (Automated Guided Vehicle) güvenli otonom navigasyonu için ihtiyaç duyduğu tüm ilgili “duyular”, merkezi bir noktada mevcuttur.
O3R yazılım mimarisi, zengin yazılım araçları seçimi ve çok sayıda arabirimden destek yoluyla hem ön geliştirmeyi hem de seri geliştirmeyi kolaylaştırır. Docker mimarisi kullanılarak Python, ROS, CUDA ve C++ gibi açık geliştirme ortamları desteklenmektedir.
| Linux, robot sistemlerinde yaygın olarak kullanılan OS (İşletim Sistemi)’dir.Yardımcı cihazlar aynı dili konuşmalıdır. | |
| Kapsayıcılar, geliştiriciye programlama dili ve ortamında tam esneklik sağlar. Bilinen yazılım ortamı kullanıldığında geliştirme süresi kısalır. | |
 |
ROS (Robot İşletim Sistemi), geliştirmede kullanılan yaygın bir ara yazılımdır.ROS2, geliştirmeden konuşlandırmaya geçme potansiyeli sağlar. |
| CUDA ve Jetpack gibi güçlü araçlar, NVIDIA tabanlı VPU (Video İşleme Ünitesi)'da tamamen konuşlandırılabilir. |


 OVP800")
 OVP801")