- Inklinometry
- Technologia
Technologia inklinometrów
„Elektroniczna poziomica”
Większość dostępnych obecnie na rynku inklinometrów (zwanych również czujnikami nachylenia lub czujnikami wychylenia) jest wyposażona w wieloosiowy akcelerometr MEMS (MEMS = mikroukład elektromechaniczny, ang. microelectromechanical system).
Tego typu komórki pomiarowe są bardzo małe, precyzyjne i wytrzymałe, a także nie ulegają zużyciu i nie wymagają konserwacji.
Mówiąc prościej, komórka pomiarowa MEMS składa się z dwóch głównych elementów: ruchomej części elektronicznej i nieruchomej części mechanicznej.
Ruchoma część wewnętrzna, składająca się z masy próbnej (sejsmicznej), wyposażona jest w elektrody na zewnętrznej krawędzi, zawieszone na elementach sprężynowych.
Elektrody te znajdują się również w zewnętrznej, stałej części komórki pomiarowej.
Elektrody umieszczone w minimalnej odległości od siebie tworzą „grzebień”.
Gdy czujnik znajduje się w pozycji poziomej, oś z czujnika jest zazwyczaj równoległa do wektora ziemi. Stąd jego wartość jest zerem „absolutnym”.
Jeśli czujnik zostanie przechylony w jednym kierunku, ruchoma masa wewnątrz i jej elektroda zmienią położenie względem elektrody nieruchomej.

Szczegółowy widok komórki MEMS
- Ruch (= przyspieszenie)
- Elektrody tworzące „grzebień”, ułożone w odległości ~1,3 µm od siebie
Wynikająca z tego zmiana pojemności elektrycznej pomiędzy tymi dwoma elektrodami jest wykrywana przez komórkę pomiarową i wykorzystywana do obliczenia ostatecznej wartości kąta.
WAŻNE!
Każdy inklinometr jest fabrycznie dostarczany z kalibracją absolutną.
Jako odniesienie stosuje się wektor grawitacji, czyli przyspieszenie grawitacyjne, 1g (= 9,81 m/s²).
Jeśli oś pomiarowa czujnika jest równoległa lub zbieżna z wektorem ziemi, nie może nastąpić pomiar kąta; czujnik nie ma orientacji w tym położeniu. W związku z tym nie jest możliwy bezpośredni pomiar kąta (detekcja obrotu) wokół pionowej osi odniesienia (kąt wychylenia), jednak kąt wychylenia może być obliczany pośrednio za pomocą zewnętrznego sterownika PLC.
Patrz „Dodatkowe funkcje dynamicznego inklinometru [JDxxxx]”.
Definicje kątów
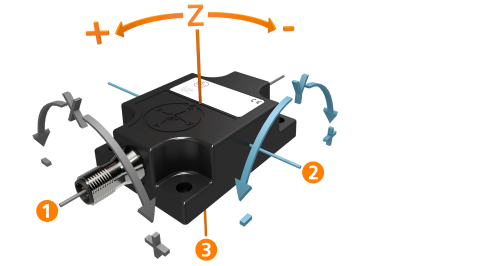
Definicja kąta przy zerowym położeniu osi z = wektor grawitacyjny
- oś y „przechylenie” (wzdłużna) ⇒ kąt x
- oś x „wysokość” (poprzeczna) ⇒ kąt y
- oś z „wychylenie” (pionowa) ⇒ kąt z