- 3D-objectherkenning type O3D
- O3R roboticaplatform
O3R: Multifunctioneel camera-sensorsysteem voor mobiele robotica
Het roboticaplatform in een overzicht
Het O3R-roboticaplatform is een multifunctioneel camera- en sensorsysteem dat in omvang en kostenstructuur niet onderdoet voor consumentenproducten. Tegelijkertijd biedt het met langdurige beschikbaarheid, hoge robuustheid en betrouwbare prestaties alle voordelen van een doorontwikkeld industrieel product.
Via FPD-link kunnen maximaal zes camerakoppen worden aangesloten op de centrale eenheid, de video processing unit (VPU). Extra sensoren, zoals radar of lidar kunnen via de Gigabit-ethernetinterface worden aangesloten. De camerakoppen kunnen flexibel worden geïnstalleerd en opgesteld. Hierdoor kan de complete omgeving naadloos worden gescand, waardoor bijvoorbeeld botsingen met obstakels die boven het gezichtsveld van de veiligheidsscanner uitsteken in de rijroute worden vermeden.
De krachtige, centrale edge computing-eenheid biedt voldoende opslagruimte en rekencapaciteiten om eigen algoritmen uit te voeren of kant-en-klare functies te gebruiken, zoals botsingsvermijding of palletherkenning.
Hoogste automatiseringsgraad in de automobielindustrie
De automobielindustrie streeft naar fase 5. Bij deze volledige automatisering is er geen interactie van de bestuurder meer nodig, waardoor een dergelijk autonoom voertuig ook door onervaren eindgebruikers zonder risico kan worden gebruikt.
De fabrikanten zijn zich ervan bewust dat fase 5 alleen met een perceptiepakket waarmee het voertuig zijn omgeving volledig kan begrijpen.
- Fusie van talrijke camera- en sensorsignalen om de omgeving van het voertuig op betrouwbare wijze te beveiligen. Elk sensorprincipe is dusdanig ontworpen, dat het de "zwakheden" van een ander principe compenseert en dus al met al een robuuste oplossing is voor de best mogelijke perceptie van de omgeving.
Beproefde technologie, aangepast aan een nieuwe omgeving
Autonomie wordt in de mobiele robotica al meer dan 70 jaar toegepast. De techniek is dan ook niet nieuw, maar tot nu toe wel verbonden met uitdagingen:
- In tegenstelling tot de automobielsector vormen kostenkwesties een belemmering voor de acceptatie van mobiele robots.
- De instapmomenten voor mobiele robots vergen een grote investering van de gebruiker, waardoor het punt waarop een hoog rendement op de investering wordt bereikt, naar achteren verschuift.
- Fabrikanten worden gedwongen compromissen te sluiten bij de keuze van hardware en zich in de eerste plaats te richten op de veiligheid om de productiekosten te drukken. Dit beperkt uiteindelijk de algemene flexibiliteit van de robot, wat op zijn beurt de prestaties vermindert.
Wat zou u ervan vinden om geen compromissen te hoeven sluiten?
Automatiseer de mobiele robotica – met het nieuwe O3R-platform
Het streven van de automobielindustrie om automatiseringsniveau 5 te bereiken, is correct en belangrijk. Want een betere perceptie van de omgeving leidt tot meer flexibiliteit en een efficiëntere, veiligere algemene werking van een autonoom voertuig.
Dezelfde mogelijkheden en voordelen zouden ook moeten bestaan voor de mobiele-robotica-industrie.
Om ook in de mobiele robotica een hoge automatiseringsgraad te bereiken, moeten de uitdagingen van veeleisende toepassingen met meerdere camera's, waaronder synchronisatie en fusie van sensoren, worden overwonnen. De enige manier om de totale bedrijfskosten voor perceptieplatforms te verlagen, is de uitvoering en integratie van complexe sensor-camerasystemen te vereenvoudigen.
Het O3R-robotplatform is ontwikkeld om deze opdracht te vervullen.
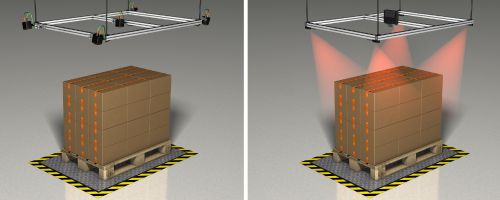
Het O3R-platform is de allesomvattende oplossing voor gecentraliseerde, gesynchroniseerde verwerking van beeld- en sensorinformatie in autonome mobiele robots, zoals AGV's. De vereenvoudigde integratie en de betrouwbare interactie van camera's en sensoren maakt een robuuste uitvoering van relevante functies zoals botsing vermijden, navigatie en plaatsbepaling mogelijk. Bovendien kunnen de analyse en de dimensionering van stilstaande objecten worden gerealiseerd en effectiever worden gemaakt door meerdere camera's te gebruiken. Voorbeelden zijn het opmeten van pallets, boomstammen, pakketten of koffers.
Camerakop met zelfontwikkelde imager

ifm biedt passende, hoogwaardige camerakoppen aan als onderdeel van de platformoplossing: de 2D/3D-camera's beschikken naar keuze over een openingshoek van 60° of 105° en zijn uitgerust met de nieuwste Time-of-Flight-imager van pmdtechnologies ag. Het bedrijf van de ifm-ondernemingsgroep ontwikkelt sensoren die worden gebruikt in de visionproducten van de automatiseringsspecialist en past ze precies aan de desbetreffende vereisten aan. Dankzij het gemoduleerde infraroodlicht herkent de 2D/3D-camera objecten met de hoogste betrouwbaarheid, zelfs bij meer omgevingslicht.
Krachtig en open: de centrale eenheid voor sensorsignaalverwerking

Het hart van het systeem is de krachtige rekeneenheid, de Video Processing Unit (VPU). De VPU is gebaseerd op Yocto Linux en NVIDIA Jetson TX2 en ondersteunt open ontwikkelomgevingen zoals ROS en Docker. De VPU heeft aansluitingen voor maximaal zes camerakoppen, en via een Gigabit-ethernetinterface kunnen extra sensoren, zoals ultrasone sensoren voor het detecteren van glazen oppervlakken als deuren of scheidingswanden, worden aangesloten. Alle relevante "zintuigen" die een AGV nodig heeft voor veilige autonome navigatie worden dus geregistreerd en verwerkt op een centraal punt.
De O3R-softwarearchitectuur vergemakkelijkt zowel de prerontwikkeling als serieontwikkeling door een rijke selectie van softwaretools en ondersteuning voor talrijke interfaces. Door gebruik te maken van een Docker-architectuur worden open ontwikkelomgevingen zoals Python, ROS, CUDA en C++ ondersteund.
| Linux is het meest gebruikte besturingssysteem in de robotica. Hulpmiddelen moeten dezelfde taal spreken. | |
| Docker-containers bieden de ontwikkelaar volledige flexibiliteit in programmeertaal en -omgeving. De ontwikkelingstijd wordt verkort door gebruik te maken van een vertrouwde softwareomgeving. | |
 |
ROS is een middleware die vaak bij de ontwikkeling wordt gebruikt. ROS2 biedt alle mogelijkheden in de ontwikkeling en zorgt voor maximale stabiliteit bij gebruik in de praktijk. |
| Krachtige tools zoals CUDA en Jetpack zijn volledig inzetbaar op de NVIDIA-gebaseerde VPU. |


 OVP800")
 OVP801")