- Enkodere
- Teknologi
Enkoderteknologi
Magnetisk teknologi
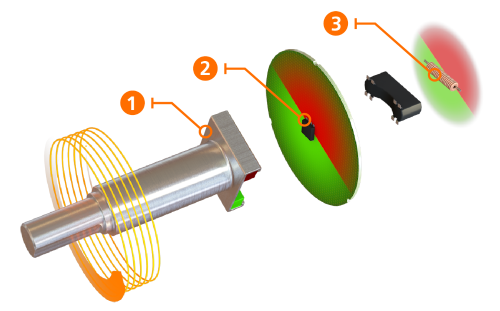
Magnetiske enkodere anvender Hall-effekt-sensorer til at detektere roterende bevægelser. Sensorerne detekterer en permanent magnets retning, der er monteret på akslen. En mikroprocessor beregner derefter akslens rotationsvinkel ud fra sensorsignalerne. På grund af dens enkle mekaniske princip er en magnetisk enkoder mindre og meget mere robust end en optisk enkoder.
Den nye generation af magnetisk baserede enkodere kan også med hensyn til måleydelse holde trit med optiske enkodere: Takket være kraftfulde mikroprocessorer, optimeret signalbehandlingssoftware og en implementeret temperaturkompensation er målenøjagtigheden øget til mere end 0,1 grader. Afvigelser på grund af temperaturforhold er reduceret til et minimum. Derudover er enkoderens svartid, der tidligere lå mellem 700 og 1.400 mikrosekunder, blevet reduceret til niveauer, der når nul mikrosekunder, og har dermed en optisk enkoders reaktionsadfærd.
Ingen værdi går tabt: Wiegand-effekten
Magnetiske enkodere detekterer rotationer ved vinkler mellem 0 og 360 grader, men Hall-effekt-sensoren kan ikke detektere antallet af fulde omdrejninger uden en ekstern strømforsyning. Dette er hvor det integrerede energihøst-system kommer ind, som er baseret på Wiegand-effekten og forsyner omdrejningstællerkredsløbet med kortvarige, kraftige spændingsimpulser. Det betyder, at enkoderen også pålideligt kan detektere og lagre omdrejninger ved lav hastighed uden en ekstern strømforsyning. Dette udelukker forkerte tildelinger af positionen på grund af akselrotation uden for maskinens kørselstider, for eksempel på grund af tryktab i en løftemekanisme.
Optisk teknologi
Envejssensorer sender lys gennem åbninger, der er ætset i en belagt glasskive. Der genereres impulser, efterhånden som strålerne brydes.
- Optiske enkodere er meget præcise.
- Optiske enkodere er meget komplekse enheder og består af mange individuelle komponenter.
- Produktionen af belagte glasskiver er meget vanskelig og dyr. Sammenlignet med enkodere med magnetisk teknologi går de nemt i stykker, når de udsættes for stød og vibration.
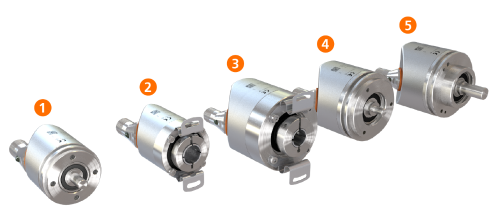
Overblik over flange- og akseltyper
- RB / RMB-type som synkro-flange med 6 mm aksel
- RA / RMA-type som direkte flange med hul aksel
- RO / RMO-type som direkte flange med hul aksel
- RU / RMU-type som synkro-flange med 6 mm massiv aksel
- RV / RMV som klemme-flange med 10 mm massiv aksel
Akseldesign
Massiv aksel
Enkodere med massiv aksel sættes på roterende maskinaksler med samme eller lignende diameter ved hjælp af en kobling. Disse koblinger kompenserer for mekaniske afvigelser mellem de to aksler og forhindrer dermed for tidlig slitage. Dette gør denne kombination velegnet til anvendelser, der er udsat for regelmæssige stød eller vibration.
Hul aksel
Hule akselencodere installeres direkte på de roterende aksler. Akselkoblinger er ikke nødvendige, hvilket letter samlingen. De anvender i stedet en fleksibel monteringsflange, der kaldes en statorkobling, der kompenserer for mindre forskydninger under installationen. Enkodere med hul aksel, der er åbne i den ene side, har ikke et gennemgående monteringshul.
Akseldiameter og konstruktionsstørrelse
Den rigtige akseldiameter er vigtig for at sikre, at den indgående aksel holdes nøjagtigt på plads.
Almindelige diametre for massive aksler er 6 mm, 8 mm og 10 mm.
Almindelige diametre for hule aksler, der er åbne i den ene side, er mellem 6 og 15 mm. Til høj diameter-fleksibilitet sættes der adapterbøsninger på 6 til 14 mm ind i den hule aksel.
En enkoders udvendige diameter udtrykkes generelt som konstruktionsstørrelsen. ifm-enkodere fås i størrelse 36 til 58 mm.