- Autonomous mobile robots
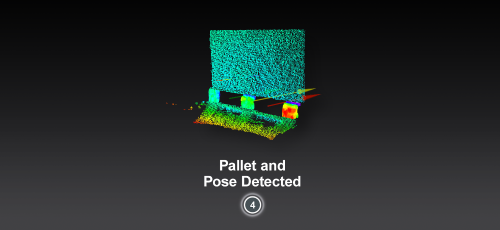
- Pallet detection algorithm
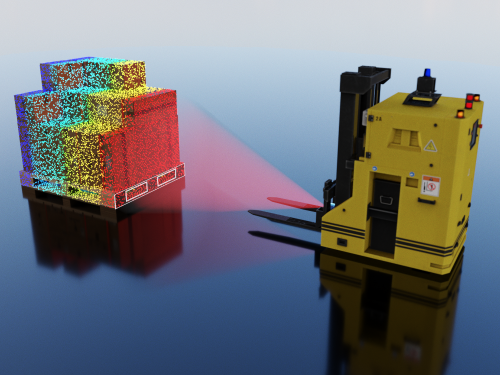
Pallet detection system: Certainty in an uncertain world
Labor shortages and increased demand have made warehouse automation a necessity for today’s facilities. Automated fork trucks and other automated mobile robots can increase operational flow with fewer human workers – but only if they work correctly. With a pallet detection system (PDS) from ifm, your automated equipment chooses the right item, moves quickly, and avoids collisions.
We developed our pallet detection system over 1,500 vehicles worldwide and more than 10 million successful picks. Thanks to rigorous real-world testing and relentless innovation, the PDS works in countless unique scenarios in virtually any environment.
Increased automation efficiency
This technology enables automated trucks to make better decisions about when to pick up or put down pallets, ultimately improving overall throughput.
Certainty in unpredictable environments
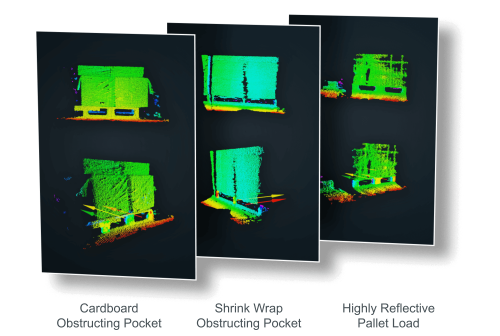
Pallets are often reused and can have damage or splinters, making them challenging for perception technology. Pallet detection systems help overcome these challenges and provide reliable information about pallet locations.
Adaptability to diverse pallet types
Pallet detection technology can adapt to various pallet types, sizes, and conditions, including standard two-pocket pallets and non-standard or user-defined pallets.
Reduced downtime
Reducing the need for operator interventions minimizes downtime and keeps operations running smoothly.
Revolutionary pallet detection from ifm
The Pallet Detection System from ifm directly impacts the performance of the autonomous and semi-autonomous vehicles. It increases the speed of detecting the pallet pose without sacrificing the quality of the detection.
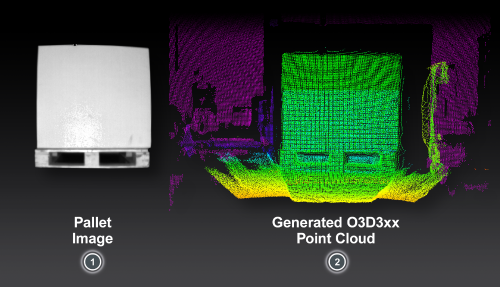
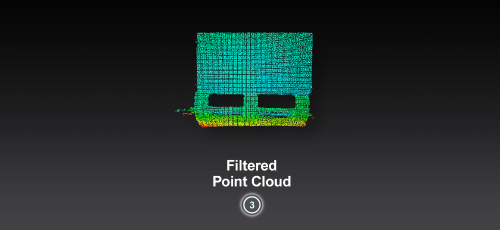
This software solution, along with the O3D3xx HW, identifies the 6-DoF pose of all standard 2-pocket pallets. It ensures your automated vehicles reliably select and place pallets, even in the most demanding conditions.
Simplifying a complex task
Automated fork trucks face a myriad of challenges, from navigating busy plant floors to the precise task of engaging with their environments. But, the ideal condition of a perfect pallet is a rarity in the bustling world of manufacturing and logistics.
Real-world pallets endure wear and tear, making them harder for most mobile robots to recognize and handle. Even an excessive amount of dirt or shrink wrap can prevent an automated forklift from recognizing its target.
The next challenge is efficiency: How many trips can your automated fork truck make in a day? How many fewer trips will it complete when it has to stop because it detects an obstacle?
Increased throughput is what makes the capital expense of a mobile robot worth it to an end user. Unexpected stops and bad picks reduce that value.
That’s where ifm comes in.
We did the work so you don’t have to
Thanks to data and development from millions of picks, the PDS from ifm not only understands the geometric complexities of pallets, but turns this knowledge into actionable data.
Our algorithms account for countless nuances, unexpected problems, outlier geometries, and other variables. We provide sub-centimeter precision in positioning and orientation, ensuring that each interaction with a pallet is seamless and exact.
And, we’re always adapting to new challenges such as varying pallet sizes and unique requirements with updates.



OEE (Overall Equipment Effectiveness) is the gold standard for measuring manufacturing productivity. Simply put – it identifies the percentage of manufacturing time that is truly productive.
The Performance metric in OEE, which measures Slow Cycles and Small Stops, is perhaps the most crucial for robotics. It measures if your robotics application is as efficient as it can be. PDS is designed to increase your performance metric by reducing the time it takes to engage with a pallet.
The future of pallet detection
Mobile robots have yet to “cross the chasm” into mass adoption. But, robust features like pallet detection and obstacle detection quickly increase the efficacy and value of AMRs.
As pallet detection systems improve, robots will be able to work faster and with more accuracy. This will increase their value, making them more affordable to both large- and mid-size companies.
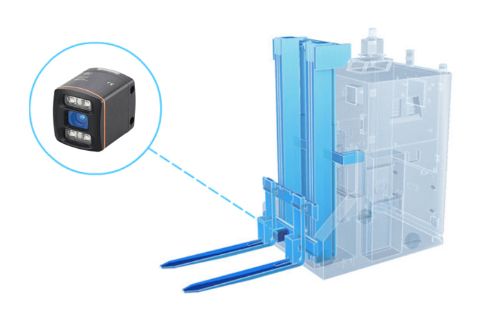
Pallet detection platform components


OVP vision processing unit specifications
- Ethernet ports: 2x 1 GigE
- Camera ports: 6x proprietary 2D/3D camera ports
- Power: 24 VDC and CAN
- USB ports: USB 3.0 + USB 2.0
O3R 2D / 3D head


OVP vision processing unit
 OVP800")
 OVP811")
 OVP810")
Accessories

Gain a competitive edge
Are you ready to take your mobile robot development to the next level? Fill out the form or contact Tim McCarver directly at tim.mccarver@ifm.com.