- 3D kohteentunnistus
- O3R-robotiikka-alusta
O3R -havainnointialusta
Havainnointialusta, yhteenveto
O3R -havainnointialustaon monianturi ja -kamera -gateway, joka vastaa kooltaan ja kustannusrakenteeltaan kuluttajatuotteita - kuitenkin teollisuustuotteiden pitkäaikaisella saatavuudella ja kestävyydellä varustettuna. Keskusyksikköön voidaan liittää FPD-linkin kautta jopa kuusi kamerapäätä ja lisäksi Gigabit Ethernet interface -liitännän kautta voidaan liittää muita antureita, kuten tutka- ja valotutka(lidar)-antureita. Joustavan asennuspaikan ja -järjestyksen ansiosta voidaan skannata erilaisia alueita ja esimerkiksi ehkäistä törmäyksiä esteisiin, jotka sijaitsevat kulkuväylällä turvaskannerin näkökentän yläpuolella.
Tehokas reunalaskentayksikkö tarjoaa riittävästi tilaa omien algoritmiesi ajamiseen tai valmiiden toimintojen kuten törmäykseneston tai lavojen tunnistamisen käyttöä varten.
Korkeimman tason automaatiota autoteollisuudessa
Automaattiohjattuja ajoneuvoja valmistavan teollisuuden (AV) tavoitteena on tason 5 autonomia, joka tarkoittaa täyttä automaatiota, jossa ei tarvita kuljettajan vuorovaikutusta, ja joka mahdollistaisi AV-ajoneuvon hankkimisen tavalliselle kuluttajalle.
- Valmistajat tunnustavat, että taso 5 on saavutettavissa vain havaintopinolla, jonka avulla ajoneuvo pystyy paremmin hahmottamaan ympäristönsä.
- Useita aistialueita käsittävä lähestymistapa ajoneuvon ympäristön hahmottamiseen.
- Jokainen aistialue on suunniteltu kompensoimaan toisen aistialueen "heikkous".
Haasteet mobiilirobotiikassa
Autonomia ei ole uutta mobiilirobotiikassa (esiteltiin ensimmäistä kertaa 1950-luvulla).
- Toisin kuin AV-teollisuudessa,kustannustekijät ovat esteenä mobiilirobotiikan käyttöönotolle.
- Mobiilirobottien hankkiminen vaatii käyttäjältä suuria investointeja, mikä pidentää niiden takaisinmaksuaikaa.
- Valmistajien on tehtävä kompromisseja laitteistojen valinnassa ja keskityttävä turvallisuuteen laitehankintakustannusten alentamiseksi.
- Pohjimmiltaan tämä rajoittaa robottien kokonaisjoustavuutta, joka puolestaan alentaa niiden kapasiteettia.
Entä, jos sinun ei tarvitsisi tehdä kompromisseja?
Otetaan tarkasteluunsivu "AV-kirjasta"
AV-teollisuus ei ole väärässä tason 5 autonomian saavuttamista koskevassa lähestymistavassaan.Parempi ympäristötietoisuus johtaa suurempaan joustavuuteen ja AV-ajoneuvon tehokkaampaan kokonaiskäyttöön.Sama kapasiteetti pitäisi löytyä myös mobiilirobottiteollisuudessa.
Jotta tämä voisi toteutua, useita menetelmiä käyttävien monikamerasovellusten haasteita (sis. synkronointi ja yhdistely) tulisi helpottaa.Ainoa tapa alentaa havainnointialustojen omistamisesta koituvia kokonaiskustannuksia on yksinkertaistaa järjestelmien rakennetta ja moniaistijärjestelmien integrointia.
O3R-havaiinointialustasuunniteltiin tämän tehtävän suorittamista varten.
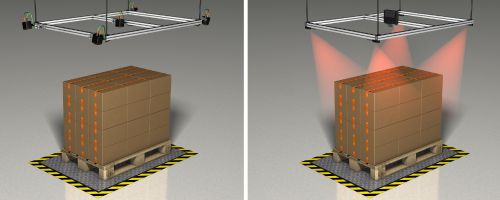
O3R-alusta on kokonaisvaltainen ratkaisu keskitettyyn, synkronoituun kuva- ja anturitietojen käsittelyyn autonomisissa mobiiliroboteissa, kuten esim. AGV-ajoneuvoissa. Kameroiden ja antureiden yksinkertaistetun integroinnin ja luotettavan vuorovaikutuksen ansiosta on mahdollista toteuttaa asiaankuuluvia toimintoja, kuten törmäyksenesto, navigointi ja paikoitus. Lisäksi voidaan toteuttaa paikallaan olevien kohteiden analysointi- ja mitoitustehtäviä, jotka voidaan suorittaa tehokkaasti usean kameran avulla. Esimerkit sisältävät kuormalavojen, tukkien, pakkausten ja matkalaukkujen mittaussovelluksia.
Kamerapää itse kehitetyllä kuvakennolla

ifm tarjoaa yhteensopivia, suorituskykyisiä kamerapäitä osana alustaratkaisua: 2D/3D-kameroiden kuvauskulma on 60 astetta ja ne on varustettu pmdtechnologies ag:n uusimmalla valon kulkuaikaan perustuvalla kuvakennolla. Tämä ifm-yritysryhmään kuuluva yritys kehittää anturit kaikkiin automaatiospesialistin konenäkötuotteisiin ja sovittaa ne tarkasti kulloisiinkin tarpeisiin. Moduloidun infrapunavalon ansiosta 2D/3D-kamera tunnistaa kohteet maksimaalisella luotettavuudella vaikeissakin valaistusolosuhteissa.
Tehokas ja avoin: keskusyksikkö anturitietojen käsittelyyn

Järjestelmän ydin on tehokas tietojenkäsittely-yksikkö (Video Processing Unit => VPU). Se perustana ovat Yocto Linux ja NVIDIA Jetson TX2 ja se tukee avoimia kehitysympäristöjä, kuten ROS ja Docker. Tietojenkäsittely-yksikköön voidaan kytkeä jopa kuusi kamerapäätä. Lisäksi Gigabit Ethernet -liitännän kautta voidaan liittää muitakin antureita, kuten ultraääniantureita lasipintojen, ovien tai väliseinientunnistamiseen. Siten kaikki oleelliset "aistit", joita AGV tarvitsee autonomista navigointia varten, ovat käytettävissä yhdessä ydinpisteessä.
O3R-ohjelmistoarkkitehtuuri helpottaa sekä esi- että sarjakehitystä laajan ohjelmistotyökalujen valikoimansa ja useita erilaisia liitäntöjä kattavan tukensa ansiosta. Docker-arkkitehtuuria käyttämällä saadaan tuki myös avoimille kehitysympäristöille, kuten Python, ROS, CUDA ja C ++.
| Linux on yleisimmin käytetty käyttöjärjestelmä robotiikkasovelluksissa.Lisälaitteiden pitää pystyä puhumaan samaa kieltä. | |
| Säiliöt (virtuaaliympäristöt) antavat kehittäjälle täyden joustavuuden ohjelmointikielen ja -ympäristön suhteen. Kehitysaika lyhenee, kun käytössä on tuttu kehitysympäristö. | |
 |
ROS on yleinen kehityksessä käytettävä väliohjelmisto.ROS2 antaa mahdollisuuden siirtyä kehityksestä käyttöönottoon. |
| Tehokkaat työkalut, kuten CUDA ja Jetpack, ovat täysin käytettävissä NVIDIA-pohjaisissa VPU-yksiköissä. |


 OVP800")
 OVP801")