Object recognition type O2D
All geometries in focus.
Object recognition for assembly, production and quality control.
The electronic eye
The application possibilities of the contour sensor efector dualis range from presence, position and orientation monitoring via sorting and counting tasks to quality control.
With an intuitive step-by-step interface and good/bad parts the user can simply create a model of the object to be recognised.
The recognition software compares the object with the saved ideal, regardless of orientation, and transmits the results (good or bad, position, orientation) to the higher-level PLC.
The sensor can manage up to 32 separate tasks with a maximum of 24 models each. In the picture on the left the contour sensor checks the correct diameter of the wheel nut drills on a brake disk.
Flexible
Orientation-independent contour verification. 32 scenes with up to 24 different objects can be saved in the unit.
Reliable
The sensor reliably detects the defined geometries at close and long range even with changing lighting conditions or backgrounds.
Safe
Password protection against unauthorised access.
Everything at a glance
Versions with different viewing angles for different field of view sizes in direct illumination or backlighting method.
Light
Integrated and/or external illumination.
Everything documented
Extensive service options with statistics file and image tank.
Presence monitoring in automated assembly: In this application, three body clips are positioned on a panel. By monitoring the contours of several clips, the missing parts are identified. Applications that otherwise could only be solved using several photoelectric sensors can now easily and reliably be adjusted and controlled by means of only one system.
The O2D vision sensor checks the correct position of small parts on automated feeders, e.g. vibratory conveyors, bad parts are rejected.
Monitoring presence or completeness for assembly steps carried out manually or by machine. The choice is yours: Field of view sizes of 14 x 20 mm to 960 x 1280 mm for a large range of applications from fine to rough processes. Objects can also be detected irrespective of the position like the clip in this example.
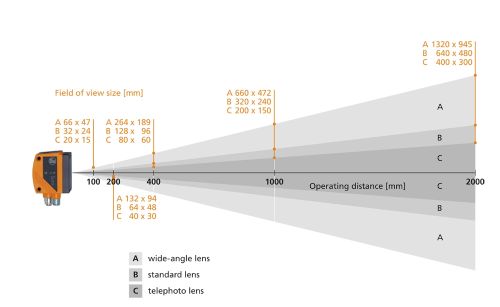
Operating distance / field of view sizes









