- 3D-Objekterkennung
- O3R Robotics Platform
O3R: Multi-Kamera-Sensor-System für mobile Robotik
Die Robotikplattform im Überblick
Die O3R-Robotikplattform ist ein Multi-Kamera- und -Sensor-System, das in Größe und Kostenstruktur Consumer-Produkten in nichts nachsteht. Gleichzeitig bietet es mit langfristiger Verfügbarkeit, hoher Robustheit und zuverlässiger Leistungsfähigkeit alle Vorzüge eines ausgereiften Industrieprodukts.
Bis zu sechs Kameraköpfe können über FPD-Link mit der Zentraleinheit, der Video Processing Unit (VPU), verbunden werden. Zusätzliche Sensoren sowie Radar oder Lidar können über die Gigabit-Ethernet-Schnittstelle angeschlossen werden. Die Kameraköpfe können flexibel eingebaut und angeordnet werden. Somit lässt sich die gesamte Umgebung lückenlos abtasten, wodurch beispielsweise Kollisionen mit Hindernissen vermieden werden, die oberhalb des Sichtfelds des Sicherheitsscanners in den Fahrweg ragen.
Die leistungsstarke zentrale Edge-Compute-Unit bietet genügend Speicherplatz und Rechenressourcen, um eigene Algorithmen auszuführen oder vorgefertigte Funktionen wie Kollisionsvermeidung oder Palettenerkennung zu nutzen.
Höchster Automatisierungsgrad in der Automobilindustrie
Die Automobilindustrie strebt nach Stufe 5. Bei dieser vollständigen Automatisierung ist keine Interaktion des Fahrers mehr erforderlich, wodurch ein solches autonomes Fahrzeug auch für fachfremde Endverbraucher risikofrei nutzbar ist.
Die Hersteller sind sich bewusst, dass Stufe 5 nur mit einem Wahrnehmungspaket erreicht werden kann, das es dem Fahrzeug ermöglicht, seine Umgebung vollständig zu erfassen.
- Fusion zahlreicher Kamera- und Sensorsignale, um die Umgebung des Fahrzeugs zuverlässig abzusichern. Jedes Sensorprinzip ist so konzipiert, dass es die "Schwächen" eines anderen Prinzips ausgleicht und somit insgesamt eine robuste Lösung für die bestmögliche Umgebungswahrnehmung.
Bewährte Technologie, an ein neues Umfeld angepasst
Autonomie wird in der mobilen Robotik bereits seit mehr als 70 Jahren eingesetzt. Die Verfahrensweise ist somit nicht neu, jedoch bislang mit Herausforderungen verbunden:
- Anders als in der Automobil-Branche sind bei mobilen Robotern Kostenpunkte ein Hindernis für die Einführung.
- Einstiegspunkte für mobile Roboter erfordern eine große Investition seitens des Nutzers, was den Zeitpunkt, ab dem eine hohe Kapitalrendite erzielt wird, nach hinten verschiebt.
- Die Hersteller sind gezwungen, bei der Auswahl der Hardware Kompromisse einzugehen und sich in erster Linie auf die Sicherheit zu konzentrieren, um die Herstellkosten zu senken. Dies schränkt letztlich die Gesamtflexibilität des Roboters ein, was wiederum seine Leistungsfähigkeit mindert.
Wie wäre es, wenn Sie keine Kompromisse eingehen müssten?
Automatisieren Sie die mobile Robotik – mit der neuen O3R-Plattform
Der Ansatz der Automobilindustrie, das Automatisierungslevel 5 zu erreichen, ist richtig und wichtig. Denn eine bessere Wahrnehmung der Umgebung führt zu mehr Flexibilität und zu einem effizienteren, sichereren Gesamtbetrieb eines autonomen Fahrzeugs.
Die gleichen Möglichkeiten und Vorzüge sollten auch für die mobile Roboterindustrie bestehen.
Um auch in der mobilen Robotik einen hohen Automatisierungsgrad zu erreichen, müssen die Herausforderungen bei anspruchsvollen Anwendungen mit mehreren Kameras, einschließlich der Synchronisierung und Fusion von Sensoren, bewältigt werden. Die einzige Möglichkeit, die Gesamtbetriebskosten für Wahrnehmungsplattformen zu senken, besteht darin, die Ausführung und die Integration komplexer Sensor-Kamera-Systeme zu vereinfachen.
Die O3R-Roboterplattform wurde entwickelt, um diese Aufgabe zu erfüllen.
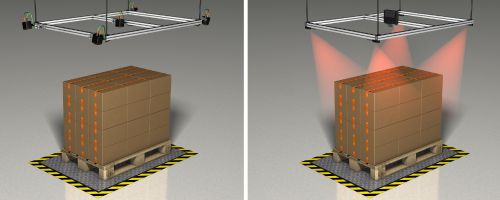
Die O3R-Plattform ist die umfassende Lösung für die zentralisierte, synchronisierte Verarbeitung von Bild- und Sensorinformationen in autonomen mobilen Robotern, wie beispielsweise FTS (AGVs). Die vereinfachte Integration und das zuverlässige Zusammenspiel von Kameras und Sensoren ermöglicht die robuste Umsetzung relevanter Funktionen wie Kollisionsvermeidung, Navigation und Positionierung. Darüber hinaus sind die Analyse und Dimensionierung von stationären Objekten realisierbar und werden durch den Einsatz mehrerer Kameras effektiver gestaltet. Beispiele sind die Vermessung von Paletten, Stämmen, Paketen oder Koffern.
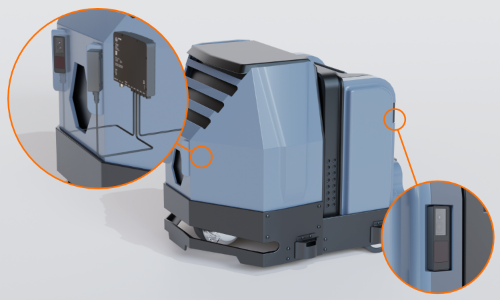
Kamerakopf mit selbst entwickeltem Imager

ifm bietet als Teil der Plattformlösung passende, leistungsstarke Kameraköpfe an: Die 2D/3D-Kameras haben wahlweise einen Öffnungswinkel von 60° oder 105° und sind mit dem neuesten Time-of-Flight-Imager der pmdtechnologies ag ausgestattet. Das Unternehmen der ifm-Unternehmensgruppe entwickelt Sensoren, die in den Vision-Produkten des Automatisierungsspezialisten eingesetzt werden und passt sie exakt an die jeweiligen Anforderungen an. Dank des modulierten Infrarotlichts erkennt die 2D/3D-Kamera auch bei erhöhter Umgebungshelligkeit Objekte mit höchster Zuverlässigkeit.
Leistungsstark und offen: die zentrale Einheit für die sensorische Verarbeitung

Das Herzstück des Systems ist die leistungsstarke Recheneinheit, Video Processing Unit (VPU). Die VPU basiert auf Yocto Linux und NVIDIA Jetson TX2 und unterstützt offene Entwicklungsumgebungen wie ROS und Docker. Die VPU hält Anschlüsse für bis zu sechs Kameraköpfe bereit, über eine Gigabit-Ethernet-Schnittstelle können zusätzliche Sensoren, wie z. B. Ultraschallsensoren zur Erfassung von Glasflächen wie Türen oder Trennwänden, angeschlossen werden. Alle relevanten "Sinne", die ein FTS/AGV für eine sichere autonome Navigation benötigt, werden somit an einer zentralen Stelle registriert und verarbeitet.
Die O3R-Softwarearchitektur erleichtert sowohl die Vorentwicklung als auch die Serienentwicklung durch eine reiche Auswahl an Softwaretools und die Unterstützung zahlreicher Schnittstellen. Durch die Verwendung einer Docker-Architektur werden offene Entwicklungsumgebungen wie Python, ROS, CUDA und C++ unterstützt.
| Linux ist das in der Robotik am häufigsten verwendete Betriebssystem. Hilfsgeräte müssen die gleiche Sprache sprechen. | |
| Docker Container ermöglichen dem Entwickler volle Flexibilität bei Programmiersprache und -umgebung. Die Entwicklungszeit wird durch die Verwendung einer vertrauten Softwareumgebung verkürzt. | |
 |
ROS ist eine in der Entwicklung häufig verwendete Middleware. ROS2 bietet alle Möglichkeiten in der Entwicklung und sorgt im realen Einsatz für maximale Stabilität. |
| Leistungsstarke Tools wie CUDA und Jetpack sind auf der NVIDIA-basierten VPU voll einsatzfähig. |


 OVP800")
 OVP801")