0
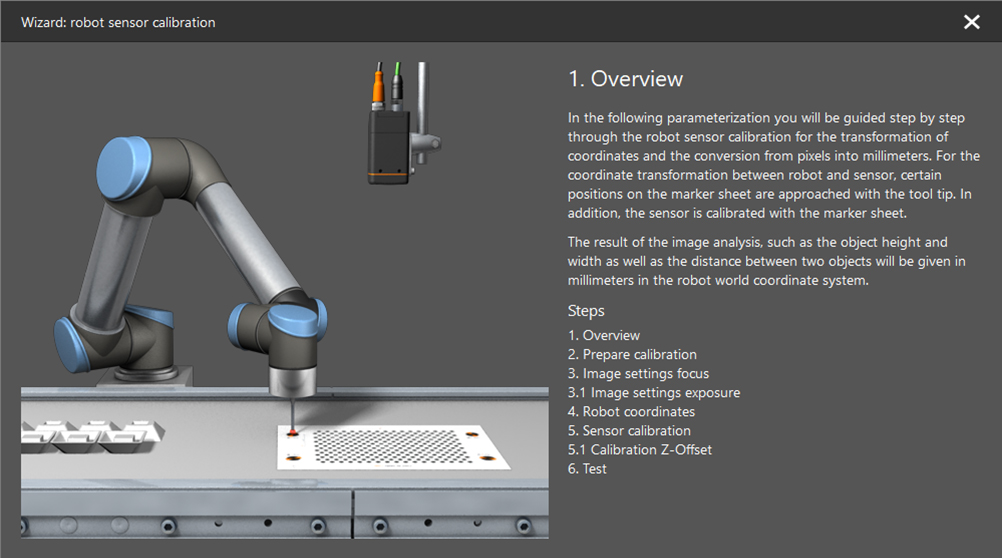
1
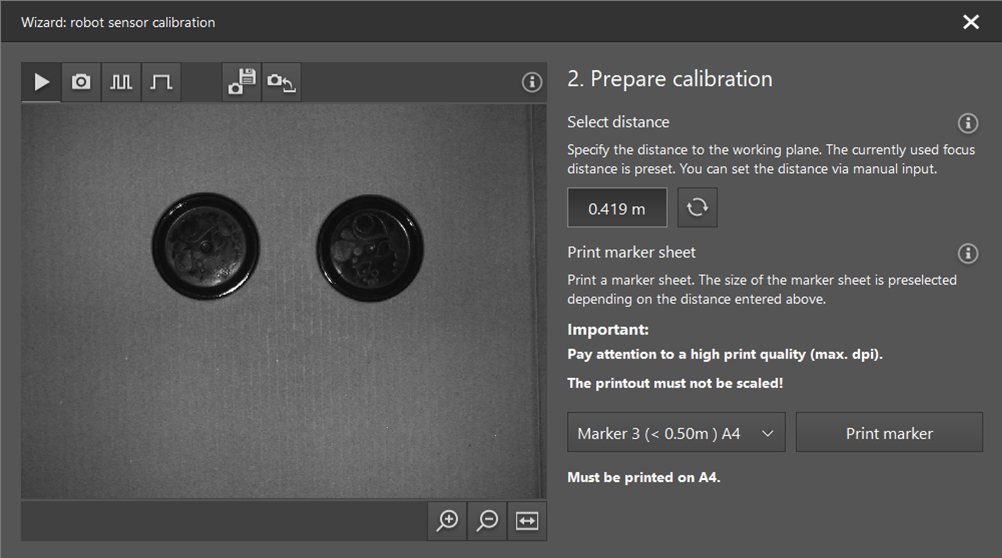
2
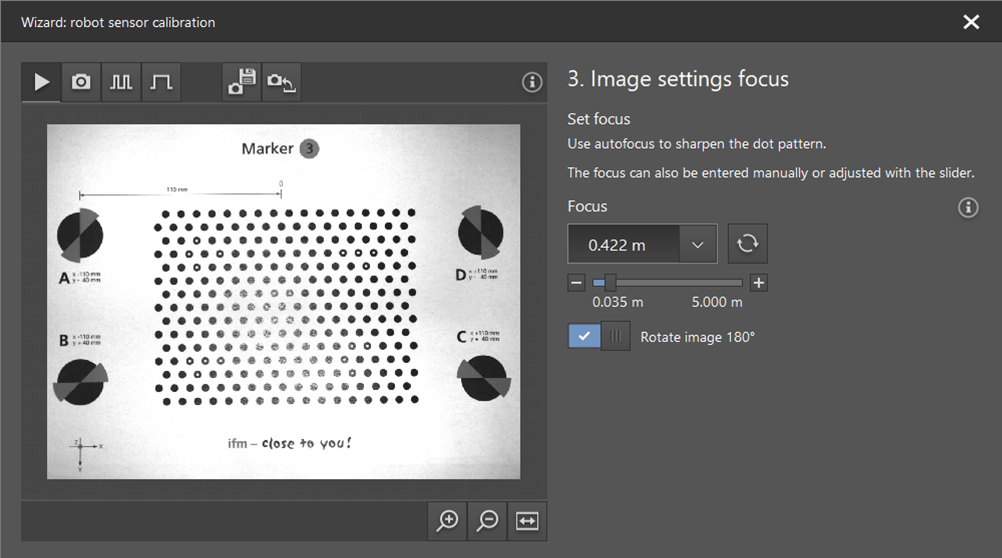
3
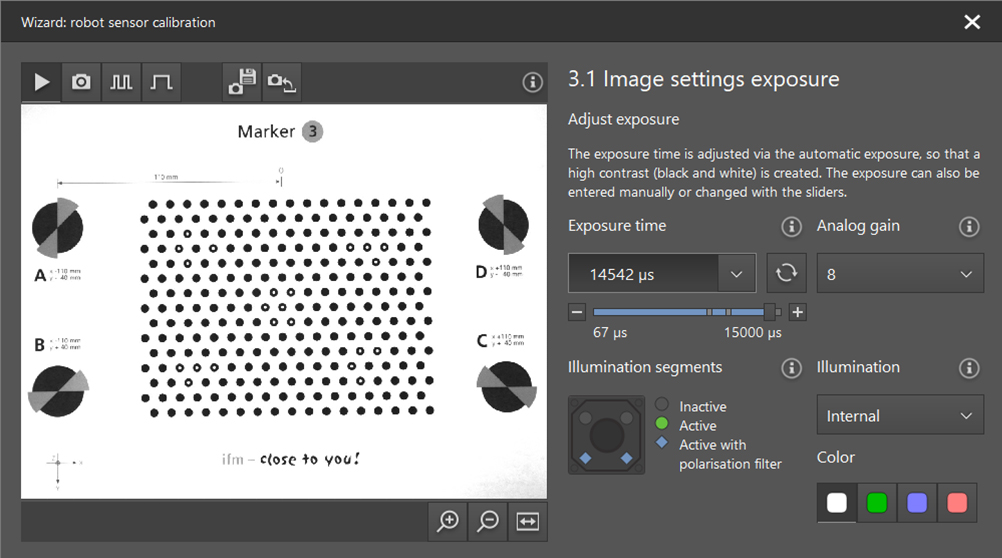
3.1
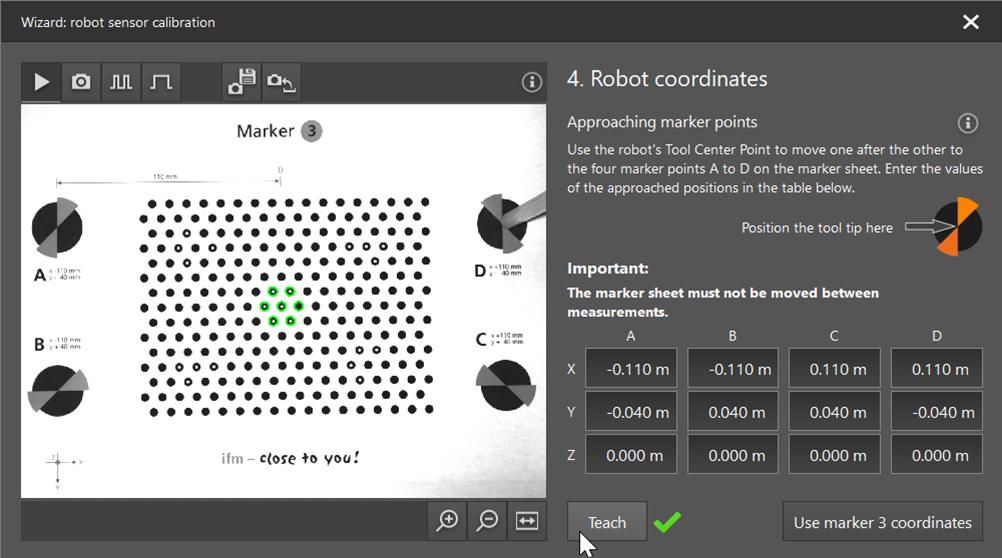
4
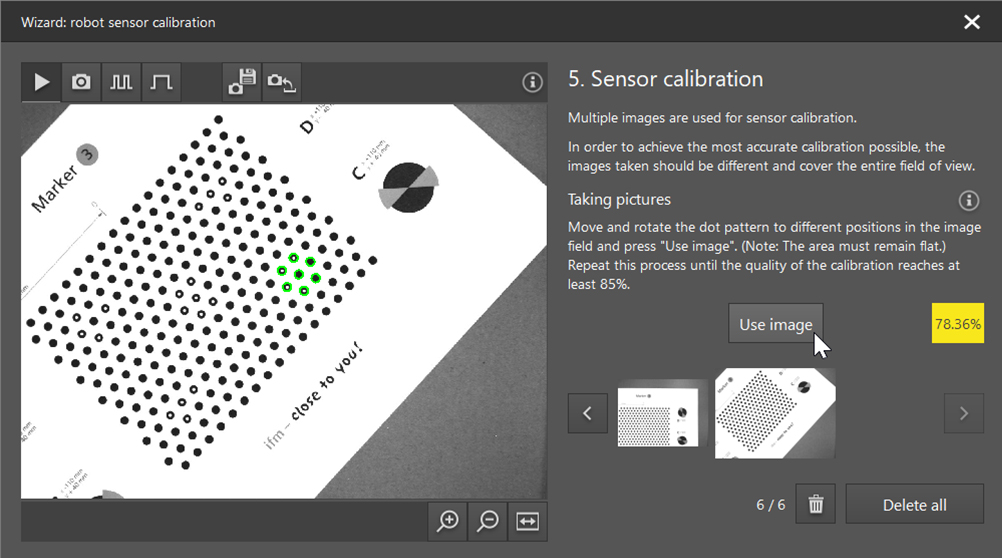
5
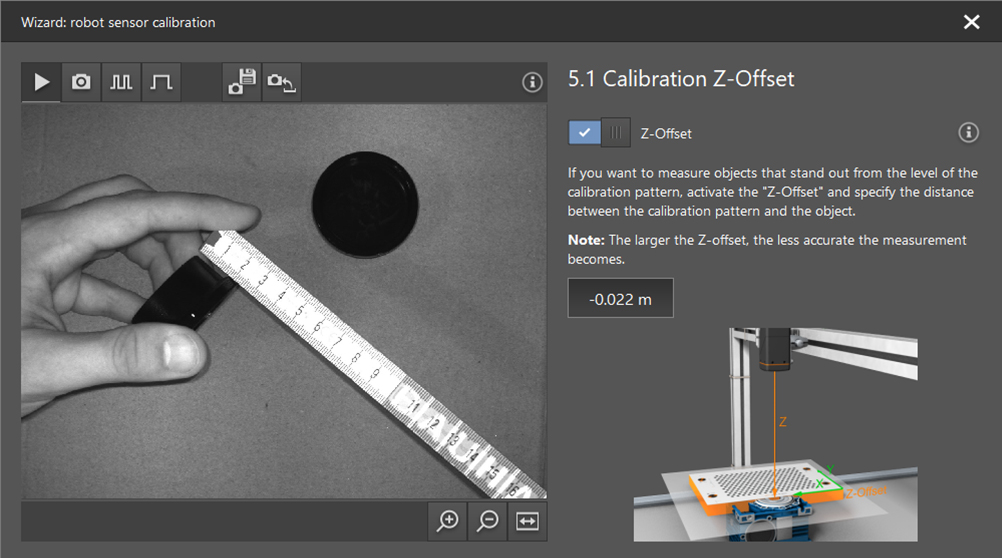
5.1
6
6.1