- Neigungssensoren
- Technologie
Neigungssensoren Technologie
Die "elektronische Wasserwaage"
Der überwiegende Großteil der heute am Markt erhältlichen Neigungssensoren (auch Neigungsgeber, Winkelgeber oder Winkelsensor genannt) sind mit einer multiachsigen MEMS-Beschleunigungsmesszelle (MEMS = micro-electro-mechanical-system) ausgestattet.
Diese Art von Messzellen sind sehr klein, sehr präzise, äußerst robust und zugleich verschleiß- und wartungsfrei.
Einfach erklärt besteht jede MEMS-Messzelle aus zwei Hauptbestandteilen: einem beweglichen elektronischen und einem festen mechanischen Teil.
Der bewegliche innere Teil, bestehend aus einer Prüfmasse (seismische Masse) ist am äußeren Rand mit Elektroden, aufgehangen an Federelementen, bestückt.
Der feste, äußere Bestandteil der Messzelle ist ebenfalls mit diesen Elektroden versehen.
Diese Elektroden bilden eine Art Kamm mit minimalstem Abstand zueinander.
Befindet sich der Sensor in horizontaler Lage, so befindet sich die Z-Achse des Sensors in der Regel parallel zum Erdvektor. Ihr Wert ist demnach absolut Null.
Wird der Sensor in eine Richtung gekippt, ändert sich die Position der beweglichen Masse im Inneren und daher auch die ihrer Elektrode gegenüber der festen Elektrode.

Detailansicht MEMS-Zelle
- Bewegung (= Beschleunigung)
- Elektrodenkämme mit ~1,3 µm Abstand zueinander
Die resultierende Kapazitätsänderung zwischen diesen beiden Elektroden wird von der Messzelle erfasst und ist die Grundlage der weiteren Berechnung in einen finalen Winkelwert.
WICHTIG!
Jeder Neigungssensor ist ab Werk absolut kalibriert.
Die Referenz hierfür ist der Gravitationsvektor, also die Erdbeschleunigung, 1g (= 9,81 m/s²).
Ist eine Messachse des Sensors parallel bzw. deckungsgleich zum Erdvektor, kann keine Winkelmessung mehr stattfinden, der Sensor ist in dieser Position orientierungslos. Eine direkte Winkelmessung (Rotationserkennung) um die vertikale Referenz-Hochachse (sog. Yaw-Winkel) ist somit nicht möglich. Über Umwege kann dieser Yaw-Winkel jedoch indirekt und extern in einer PLC berechnet werden.
Siehe „Zusatzfunktionen des dynamischen Neigungssensors [JDxxxx]".
Winkeldefinitionen
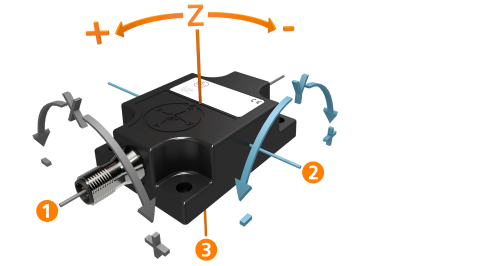
Winkeldefinition bei Nulllage Z-Achse = Gravitationsvektor
- Y-Achse "Roll" (longitudinal) ⇒ Winkel X
- X-Achse "Pitch" (lateral) ⇒ Winkel Y
- Z-Achse "Yaw" (vertikal) ⇒ Winkel Z